Global Positioning System Reference
In-Depth Information
ing PRN code properties, frequency generation, and associated modulation pro-
cesses are contained in Chapter 4.
2.4.1 Determining Satellite-to-User Range
Earlier, we examined the theoretical aspects of using satellite ranging signals
and multiple spheres to solve for user position in three dimensions. That example
was predicated on the assumption that the receiver clock was perfectly synchro-
nized to system time. In actuality, this is generally not the case. Prior to solving for
three-dimensional user position, we will examine the fundamental concepts involv-
ing satellite-to-user range determination with nonsynchronized clocks and PRN
codes. There are a number of error sources that affect range measurement accuracy
(e.g., measurement noise and propagation delays); however, these can generally
be considered negligible when compared to the errors experienced from
nonsynchronized clocks. Therefore, in our development of basic concepts, errors
other than clock offset are omitted. Extensive treatment of these error sources is
provided in Section 7.2.
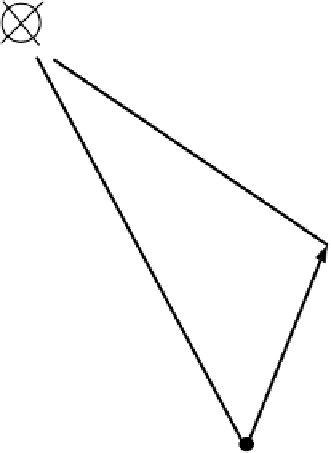
In Figure 2.15, we wish to determine vector
u
, which represents a user receiver's
position with respect to the ECEF coordinate system origin. The user's position
coordinates
x
u
,y
u
,z
u
are considered unknown. Vector
r
represents the vector offset
from the user to the satellite. The satellite is located at coordinates
x
s
,y
s
,z
s
within the
GPS Satellite
r
s
User
u
Earth
Figure 2.15
User position vector representation.


Search WWH ::

Custom Search