Global Positioning System Reference
In-Depth Information
sette tape player, an 8086-based computer, dual odometers, a compass, and a small
cathode ray tube display. A digital road map was stored on the cassette tape. The
system used the compass, differential odometry, and map matching to position the
vehicle [42-44]. Map matching is the process of correlating the vehicle path with a
drivable path in the digital road map [45]. The map and the vehicle position were
displayed, and as the vehicle moved, the map would move, keeping the vehicle sym-
bol in the center of the screen. With map matching, a basic assumption made is that
the vehicle is on the road network so that the DR position is constrained to one of
the road segments in the map. As the vehicle travels, the DR sensors provide a path
of the vehicle, which is matched up with road segments in the map database that
have the same approximate shape in order to determine the position of the vehicle.
One major challenge with map matching before GPS was available was the ini-
tialization of the system when the starting position was not known. In early naviga-
tion systems, the user sometimes had to be prompted to enter the current position.
Of course this was difficult if the user did not know where they were! With GPS, the
absolute position is readily determined, and, in time, GPS receivers were added to
navigation systems. Initially, GPS was only used to get the DR/map matching sys-
tem started or to detect large errors. Then systems emerged where the GPS/DR trace
was compared with the digital road map in order to find the most probable location
of the vehicle [46]. Today, most navigation systems rely primarily on GPS and use
DR and map matching to correct GPS errors and bridge the coverage gaps.
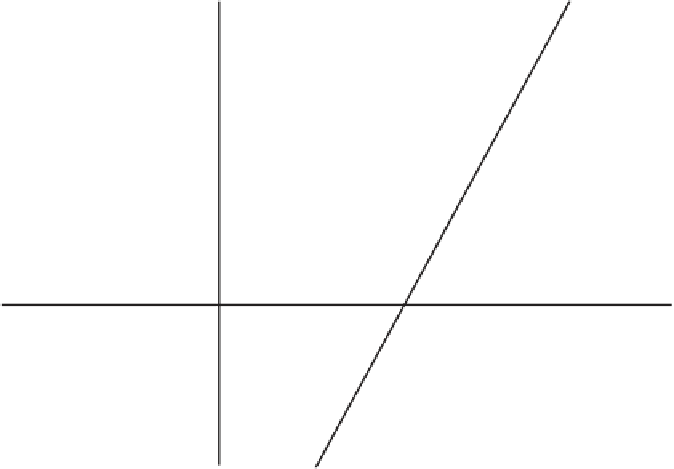
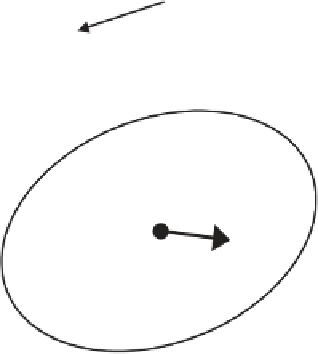
A robust map matching implementation uses confidence measures to determine
all possible road segments in the map on which the vehicle could be traveling, as
illustrated in Figure 9.27 [47]. As the vehicle travels, distance traveled and changes
in direction are used to continuously determine the shape of the route traveled; this
shape is used to match the road network in the map through shape correlation.
When an accurate heading is known, the list of roads is reduced to those that have a
Rejected roads
Combined confidence
region of position and
map uncertainties
Filtered vehicle
position and heading
Accepted road
Bearing constraint
Figure 9.27
Road selection and map aiding. (
From:
[47]. © 1995 University of Calgary. Reprinted
with permission.)




Search WWH ::

Custom Search