Global Positioning System Reference
In-Depth Information
75
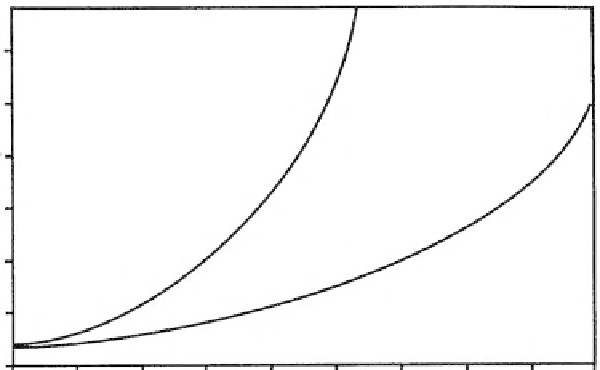
10°/hr Before GPS calibration
50
25
1°/hr After GPS calibration
60
90
120
30
Time of free inertial (sec)
Figure 9.5
Inertial navigation before and after GPS calibration.
tial drift rate differs.) The major errors are the gyro bias and accelerometer bias,
which are typically six of the states within an inertial or GPSI Kalman filter. During
the operation of a GPSI system, the Kalman filter will produce an estimate of these
biases as derived from the velocity data received from the GPS receiver. GPS receiver
velocity accuracy is nominally 0.2 m/s, 95%.
9.2.3 The Kalman Filter
The integration of GPS and inertial sensors is typically accomplished through use of
a Kalman filter [5]. Kalman filtering, introduced in 1960 by Dr. R. E. Kalman [6], is
a statistical technique that combines knowledge of the statistical nature of system
errors with knowledge of system dynamics, as represented as a state space model, to
arrive at an estimate of the state of a system. The state space model can include any
number of unknowns. In a navigation system, we are usually concerned with posi-
tion and velocity, as a minimum, but it is not unusual to see filters for system models
with state vector dimensions ranging from 6 to 60. The state estimate utilizes a
weighting function, called the Kalman gain, which is optimized to produce a mini-
mum error variance. For this reason, the Kalman filter is called an optimal filter. For
linear system models, the Kalman filter is structured to produce an unbiased
estimate.
Let us first look at a simplified filter for estimating a constant but unknown sca-
lar quantity,
x
. Assume a measurement model in which at each measurement time,
t
n
, noise is added to
x
, producing an observation
y
(
t
n
) of the form
()
()
yt
=+ε
x
t
n
m
n
The measurement noise sequence {
ε
m
(
t
n
)}isassumedtobezeromeanGaussian
σ
2
σ
2
)] and white [i.e., successive values of
with variance
[i.e., N(0,
ε
m
(
t
n
) are statisti-
cally independent of each other]. The sequence {
ε
m
(
t
n
)} is not necessarily stationary.
Search WWH ::

Custom Search