Global Positioning System Reference
In-Depth Information
30
20
10
0
−
10
−
20
−
30
20
0
5
15
10
Run time (minutes)
Figure 8.16
(Top line) Carrier-phase and (bottom line) smoothed-code DDs.
1
0.5
0
−
0.5
−
1
20
5
15
0
10
Run time (minutes)
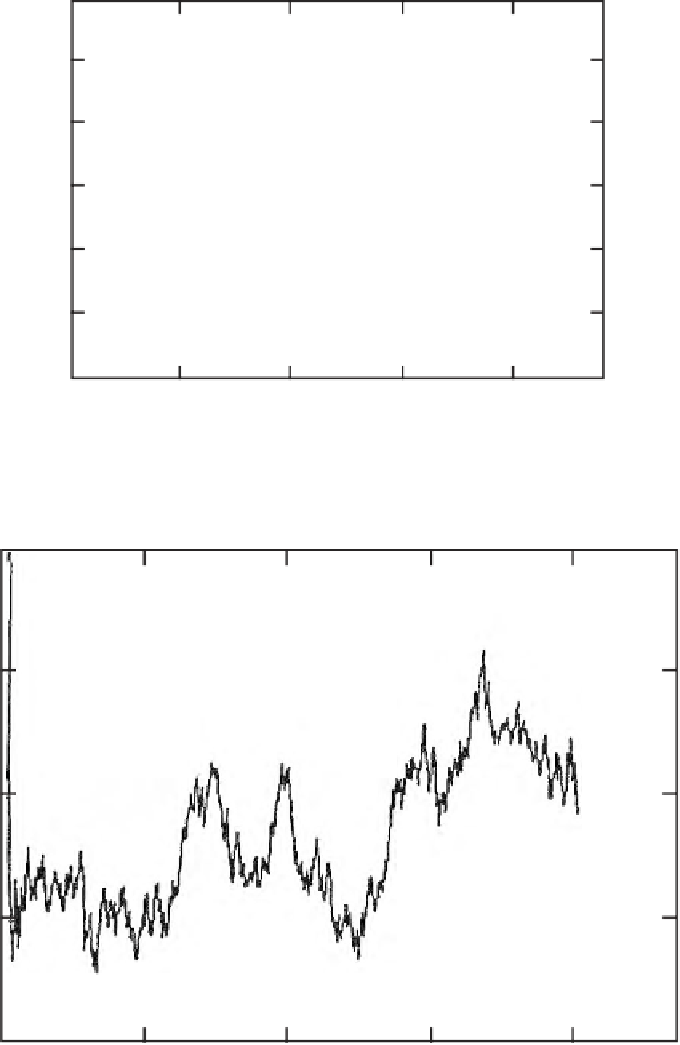
Figure 8.17
Carrier-phase minus smoothed-code DDs.
8.4.1.5 Initial Baseline Determination (Floating Solution)
The smoothed-code DD from the complementary Kalman filter, once the filter is
initialized, is key to determining the floating solution. The floating baseline solution
is a least squares fit yielding an estimate of the baseline vector
b
, accurate to within a

Search WWH ::

Custom Search