Global Positioning System Reference
In-Depth Information
SV p
SD
km
p
e
p
m
b
k
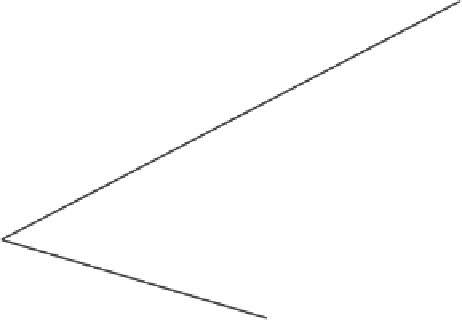
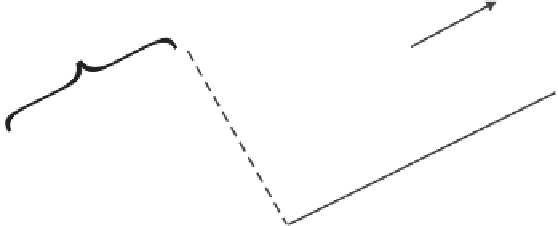
Figure 8.12
GPS interferometer—one satellite.
φ
p
is the transmitted satellite signal phase as a function of time
φ
p
()and
φ
p
()are the receiver-measured satellite signal phase as a function of
time
N
is the unknown integer number of carrier cycles from SV
p
to
k
or SV
p
to
m
S
is phase noise due to all sources (e.g., receiver, multipath)
f
is the carrier frequency
is the associated satellite or receiver clock bias
iono
is the advance of the carrier (cycles) due to the ionosphere
tropo
is the delay of the carrier (cycles) due to the troposphere
The minus sign associated with the ionospheric effects will be discussed later in
this section.
The interferometric variable, the SD, is now created by differencing the carrier-
cycle propagation path lengths (SV
p
to
k
and SV
p
to
m
):
p
p
p
p
SD
=
φ
+
N
+
S
+
f
τ
(8.10)
km
km
km
km
km
The nomenclature remains the same as in (8.9) but certain advantages accrue in
forming the SD metric. Prime among these are the cancellation of the transmitted
satellite signal phase and clock biases, and the formation of a combined integer
ambiguity term that represents the integer number of carrier cycles along the path
from
m
to the projection of
k
onto the
mp
LOS. A combined phase-noise value has
been created, as well as a combined receiver clock-bias term. With regard to the ion-
osphere and troposphere, these effects cancel, too, if the receivers are coaltitude and
closely spaced (baselines less than 50 km). This condition will be assumed to exist
for purposes of the discussion. (See Sections 8.2.3 and 8.2.4 for a discussion of dif-
ferential ionospheric and tropospheric error characteristics.) Errors in satellite
ephemerides (see Section 8.2.2) have not been considered but are usually very small
(ranging from 5m to 10m). Since they are a common term, like the satellite clock
bias, they cancel when the SD is formed.


Search WWH ::

Custom Search