Global Positioning System Reference
In-Depth Information
RS
RS
RS
RS
RS
RS
RS
MCS
RS
RS
RS
RS
RS
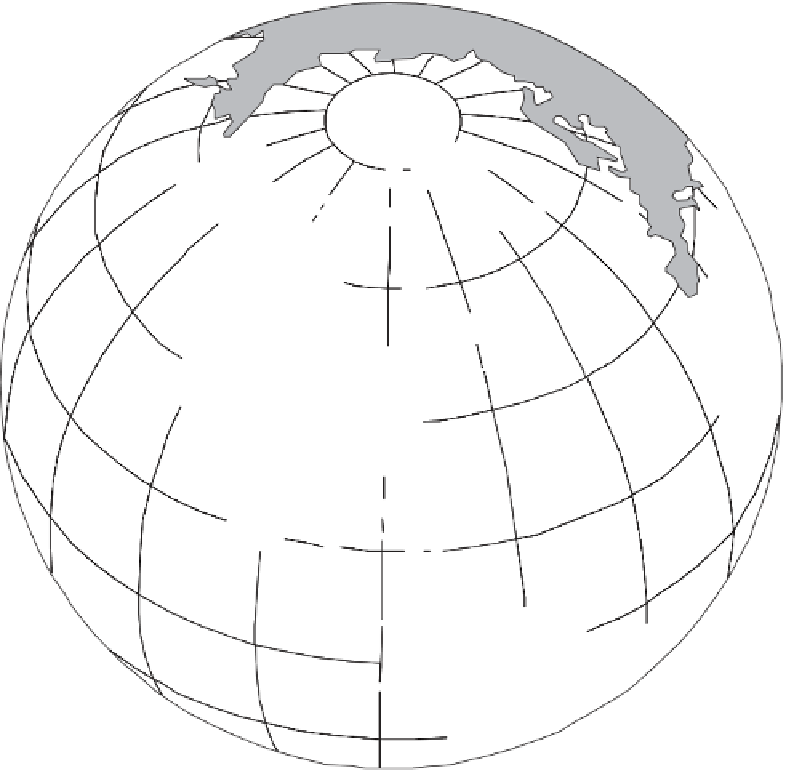
Figure 8.10
WADGPS concept.
and clock errors of the GPS satellites that are visible to the network. For each satel-
lite, the three-dimensional position error (e.g., in an ECEF coordinate system)
between the WADGPS position estimate and the broadcast position is provided to
the user. The user then maps this satellite position correction into a pseudorange
correction by projecting the position error onto the LOS direction to the satellite. A
separate clock correction is also broadcast to the user that can be directly applied as
an additional pseudorange correction.
The central processing site can estimate the true GPS satellite positions and
clocks by reversing the basic GPS algorithm. Here four or more widely separated
ground stations whose positions are accurately known each calculate the
pseudorange to a given satellite, after estimating and removing the atmospheric
delays [11, 12]. Synchronization of the reference station clocks is required, which
may be accomplished using GPS. In practice, extremely accurate position and
clock estimates can be achieved by combining the concept of a reverse-GPS solution
with sophisticated models to describe the motion of the GPS satellites over time.
Such modeling is a standard method used for orbit determination for many satellite


















































Search WWH ::

Custom Search