Global Positioning System Reference
In-Depth Information
R3 +
ε
Foghorn 3
E
A
D
C
Foghorn 1
Foghorn 2
R2 +
ε
R1 +
ε
ε
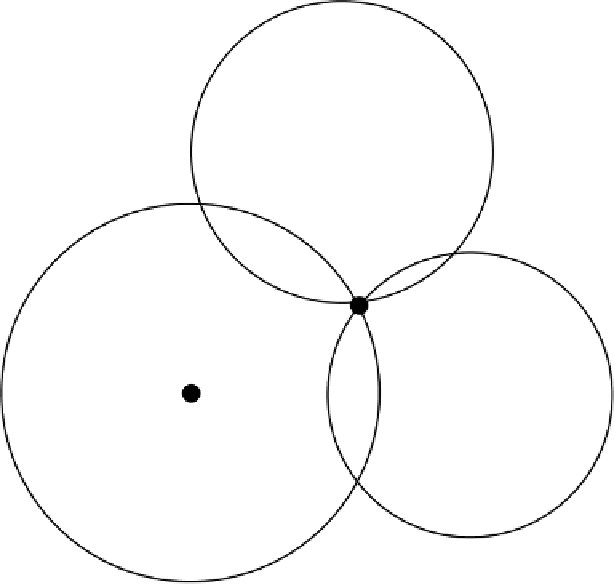
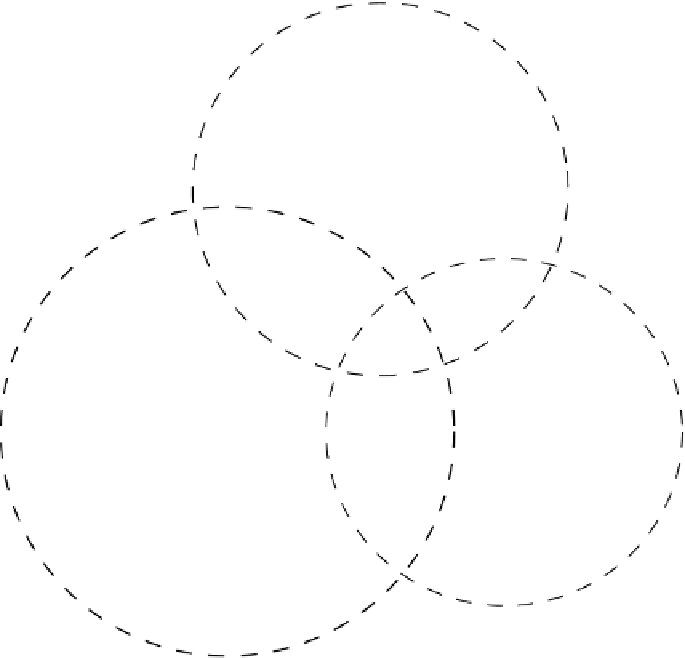
Figure 2.4
Effect of receiver clock offset on TOA measurements. (
After:
[1].)
errors (i.e.,
1
,
2
, and
3
) on position determination assuming foghorn timebase/mar-
iner clock synchronization. Instead of the three range circles intersecting at a single
point, the vessel location is somewhere within the triangular error space.
2.1.2
Principle of Position Determination Via Satellite-Generated Ranging
Signals
GPS employs TOA ranging for user position determination. By making TOA mea-
surements to multiple satellites, three-dimensional positioning is achieved. We will
observe that this technique is analogous to the preceding foghorn example; how-
ever, satellite ranging signals travel at the speed of light, which is approximately 3
×
10
8
m/s. It is assumed that the satellite ephemerides are accurate (i.e., the satellite
locations are precisely known).
2.1.2.1 Three-Dimensional Position Location Via Intersection of Multiple Spheres
Assume that there is a single satellite transmitting a ranging signal. A clock onboard
the satellite controls the timing of the ranging signal broadcast. This clock and others
onboard each of the satellites within the constellation are effectively synchronized to
an internal system time scale denoted as GPS system time (herein referred to as sys-
tem time). The user's receiver also contains a clock that (for the moment) we assume







Search WWH ::

Custom Search