Global Positioning System Reference
In-Depth Information
CS monitor station ORDs and ERDs against a difference threshold, and rejecting
ERDs that vary too much relative to the measured SIS URE.
The following computation supports generation of ERDs for any arbitrary loca-
tion. The error in satellite position is computed by subtracting the current state posi-
tion estimate from the predicted position based (nominally) on the navigation
message. The error in satellite clock is computed by subtracting the current state
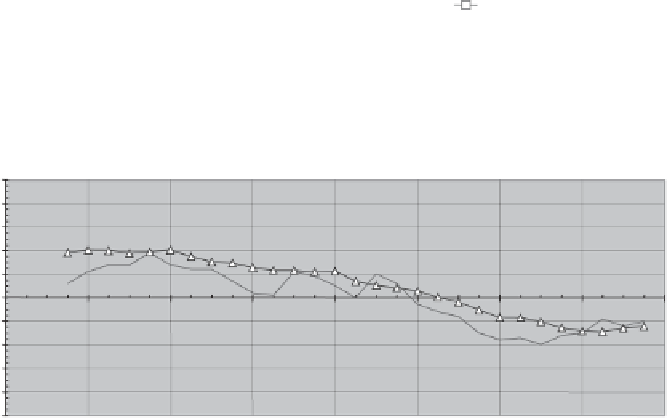
clock estimate from the predicted clock from the navigation message. Examples of
ERD computation results and a comparison with ORD values are provided in
Figure 7.31.
[
]
(
)
(
)
predicted
r
SV
,
t
−
r
Site
(
(
)
)
s
ν
j
k
site
m
()
ecef
EPH
_
ERD SV
,
Site
,
t
=
∆
r
SV
,
t
⋅
m
(
j
m
k
s
ν
j
k
)
(
)
predicted
r
SV
,
t
−
r
Site
s
ν
j
k
site
m
(
(
(
)
)
)
()
ERD SV
,
Site
,
t
=
EPH
_
ERD SV
,
Site
,
t
−
CLOCK
_
ERD SV
,
t
m
j
m
k
j
m
k
j
k
where:
k
th time corresponding to the estimated signal reception times for all
satellites in view
t
k
=
Comparison of PRN 1 ERD and ORD Values
16 July 2002
5
4
3
2
1
0
−
−
1
PRN 1 - MS6 ERD
−
−
3
PRN 1 - MS6 ORD
−
5
7
8
9
10
11
12
13
Time of day (hours UTC)
Comparison of PRN 27 ERD and ORD Values
16 July 2002
5
4
PRN 27 - MS7 ERD
PRN 27 - MS7 ORD
3
2
1
0
−
−
1
−
−
3
−
5
0
1
2
3
4
5
6
7
8
Time of day (hours UTC)
Figure 7.31
Examples of ERD computation and comparison results.






































Search WWH ::

Custom Search