Global Positioning System Reference
In-Depth Information
X1A = Remainder[X1 / 4092]
Zslip=Z*37
X2 = X1 Zslip
If X2 < 0 Then X2 = X2 + 15,345,037
−
End of week
Yes
Z = 403,199 AND
X1 > 15,339,838
Yes
No
X1 > 15,340,907
End of X1 cycle
Yes
X1 > 15,340,563
X1B=X1A+1
X2A = X1A
X2B = X1B
No
No
X1 > 15,340,907
No
End
Set D1B Flag
Yes
Yes
X1 > 15,340,563
Set D1B Flag
No
X1B = Remainder[X1 / 4093]
X1B=X1A+1
Yes
X1 > 15,339,941
Yes
Set D2B EOW
X2 > 15,344,655
X2=X2
X2A = Remainder[X2 / 4092]
X2B=X2A+1
No
Set D2A EOW
End
Yes
X2 > 15,340,907
No
X1B = Remainder[X1 / 4093]
Set D2A Flag
Yes
X2 > 15,340,563
Set D2B Flag
No
X2A = Remainder[X2 / 4092]
X2B = Remainder[X2 / 4093]
End
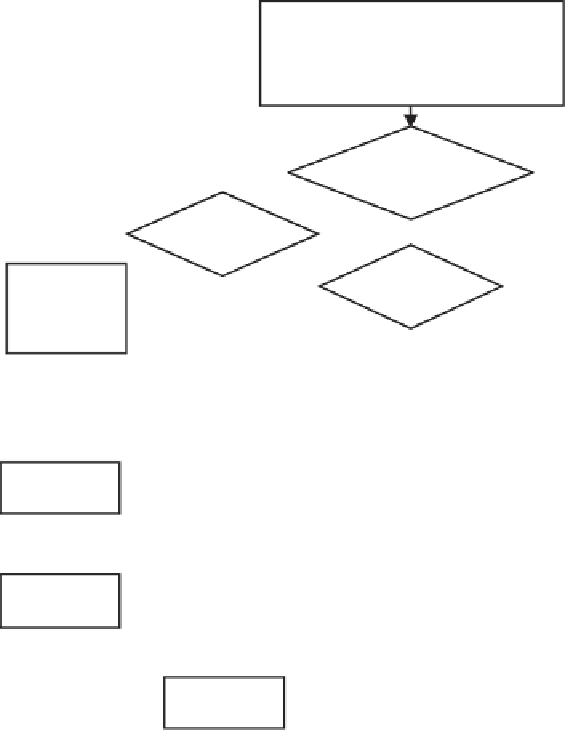
Figure 5.32
Flowchart of P code setter algorithm.
navigation solution has converged. Under certain jamming conditions, it may be
impossible to acquire the C/A code but possible to acquire P(Y) code. Then, direct
P(Y) code acquisition is essential. This is possible only if the navigation state has
sufficient position, velocity, and time precision, plus the ephemeris data for all SVs
to be acquired, or this information is transferred to the receiver by an operating host



















Search WWH ::

Custom Search