Global Positioning System Reference
In-Depth Information
(
C/N
0dB
)
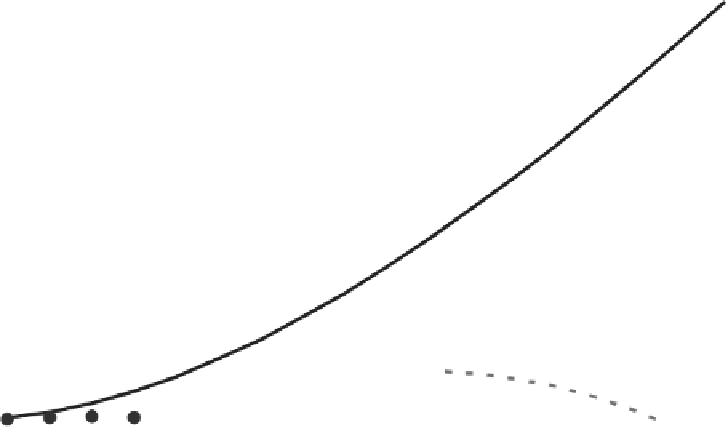
= 24 dB-Hz
(
C/N
0dB
)
= 28 dB-Hz
(
C/N
0dB
)
= 35 dB-Hz
660
600
Frequency 1,575.42 MHz
Prediction integration time
=
5 ms
=
540
480
420
360
300
240
180
120
60
0
1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8
Noise bandwidth (Hz)
Figure 5.27
Jerk stress thresholds for second-order FLL.
5.6.3 C/A and P(Y) Code Tracking Loop Measurement Errors
When there is no multipath or other distortion of the received signal and no interfer-
ence, the dominant sources of range error in a GPS receiver code tracking loop
(DLL) are thermal noise range error jitter and dynamic stress error. The rule-of-
thumb tracking threshold for the DLL is that the 3-sigma value of the jitter due to all
sources of loop stress must not exceed half of the linear pull-in range of the
discriminator. Therefore, the rule-of-thumb tracking threshold is:
3
σ
=
3
σ
+
e
RD
≤
2
(5.21)
DLL
tDLL
where:
σ
tDLL
=
1-sigma thermal noise code tracking jitter (chips)
R
e
=
dynamic stress error in the DLL tracking loop (chips)
D
=
early-to-late correlator spacing (chips)
A general expression for thermal noise code tracking jitter for a noncoherent
DLL discriminator is [11]:


















Search WWH ::

Custom Search