Global Positioning System Reference
In-Depth Information
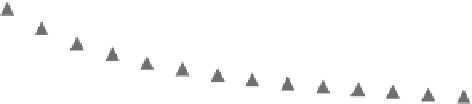
Allan deviation specification (dimensionless)
1 X 10^-11
1 X 10^-10
1 X 10^-9
20
18
16
14
12
10
8
6
4
2
0
0.5
2
4
6
8
10
12
14
16
18
PLL noise bandwidth (Hz)
Figure 5.23
Allan deviation jitter in third-order PLL at L1.
suffice. There should be no more than about a 7% overshoot if the filter is designed
for minimum mean square error, which is the case for the typical loop filter coeffi-
cients shown in the table. From Table 5.6, a second-order loop with minimum mean
square error, the dynamic stress error is:
2
2
2
2
2
2
dRdt
dRdt
B
dRdt
B
θ
=
=
=
0 2809
.
(degrees)
(5.14)
e
2
2
2
2
ω
n
0
n
053
.
where
d
2
R
/
dt
2
maximum LOS acceleration dynamics (°/s
2
).
From Table 5.6, a third-order loop with minimum mean square error, the
dynamic stress error is defined as follows:
=
3
3
3
3
3
3
dRdt
dRdt
B
dRdt
B
θ
=
=
=
0 4828
.
(degrees)
(5.15)
e
3
3
3
3
ω
0
n
n
07845
.
where
d
3
R
/
dt
3
maximum LOS jerk dynamics (°/s
3
).
Note that (5.15) is a 3-sigma error. As an example of how this error is com-
puted, suppose the third-order loop noise bandwidth is 18 Hz and the maximum
LOS jerk dynamic stress to the SV is 10 g/s
=
98 m/s
3
. To convert this to °/s
3
, multiply
the jerk dynamics by the number of carrier wavelengths contained in 1m in units of
=


































Search WWH ::

Custom Search