Global Positioning System Reference
In-Depth Information
+
.
T
y(n)
x(n)
Σ
+
A
Z
−
1
1
S
y(t)
x(t)
(a)
(b)
+
+
.
1/2
T
Σ
Σ
y(n)
x(n)
+
+
Z
−
1
A
.
(c)
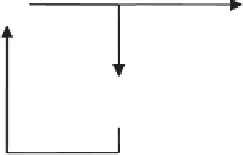
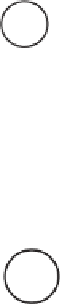
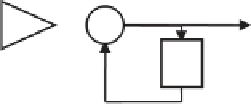
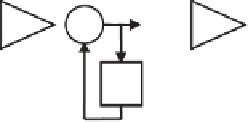
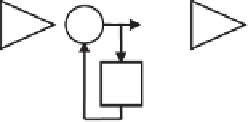
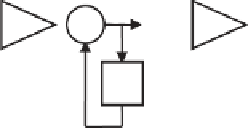
Figure 5.19
Block diagrams of: (a) analog, (b) digital boxcar, and (c) digital bilinear transform
integrators.
ω
0
(a)
+
+
+
.
.
ω
0
2
1/2
1/2
T
Σ
Σ
Σ
+
+
+
Z
−
1
.
a
2
ω
(b)
+
+
+
+
+
+
.
ω
0
3
T
T
.
.
T
.
1/2
1/2
1/2
Σ
Σ
Σ
Σ
Σ
Σ
+
+
+
+
+
+
Z
−
1
Z
−
1
.
.
.
.
a
30
2
ω
b
3
ω
(c)
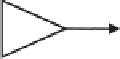
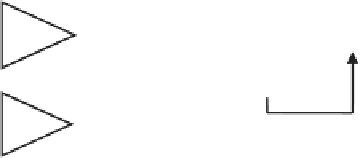
Figure 5.20
Block diagrams of (a) first-, (b) second-, and (c) third-order digital loop filters exclud-
ing last integrator (the NCO).


























































Search WWH ::

Custom Search