Global Positioning System Reference
In-Depth Information
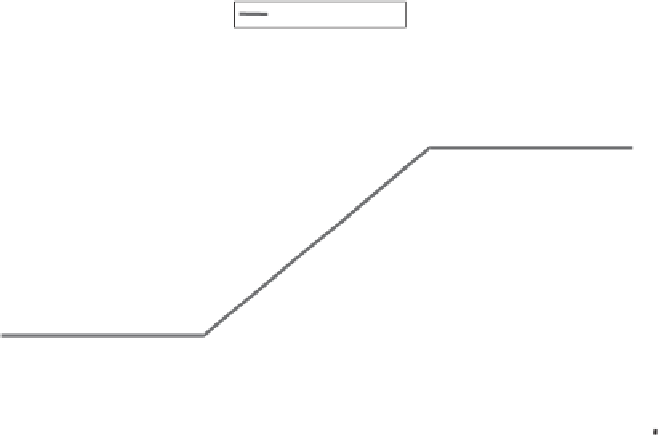
NormalizedE-L
1
0.75
.
0.5
.
0.25
(d)
.
0
(c)
(a
.
0.25
−
(b)
0.5
−
0.75
−
−
1
1.5
1
0.5
0
0.5
1
1.5
−
−
−
Replica code offset (chips)
Figure 5.17
Code discriminator output versus replica code offset.
loop and carrier tracking loop thresholds. The extra margin in the code loop thresh-
old only pays off for aided GPS receivers. The Texas Instruments TI 4100 GPS
receiver [3] not only used the tau-dither technique, but also time shared only two
analog correlators and the same replica code and carrier generators to simulta-
neously and continuously track (using 2.5-ms dwells) the L1 P code and L2 P code
signals of four GPS satellites. It also simultaneously demodulated the 50-Hz naviga-
tion messages. Because the L2 tracking was accomplished by tracking L1-L2, this
signal with nearly zero dynamics permitted very narrow bandwidth tracking loops
and therefore suffered only a little more than 6 dB of tracking threshold losses
instead of the expected 12 dB. Since the same circuits were time shared across all
channels and frequencies, there was zero interchannel bias error in the TI 4100 mea-
surements.
Modern digital GPS receivers often contain many more than three complex
correlators because digital correlators are relatively inexpensive (e.g., only one
exclusive-or circuit is required to perform the 1-bit multiply function). The innova-
tions relating to improved performance through the use of more than three complex
correlators include faster acquisition times [4], multipath mitigation (e.g., see [5],
and also Section 6.3), and a wider discriminator correlation interval that provides
jamming robustness when combined with external (IMU) aiding [6]. However, there
is no improvement in tracking error due to thermal noise or improvement in track-
ing threshold using multiple correlators. Reducing parts count and power continue
to be important, so multiplexing is back in vogue. The speed of digital circuits has
increased to the point that correlators, NCOs, and other high-speed baseband func-
tions can be digitally multiplexed without a significant power penalty because of the
reduction in feature size of faster digital components. The multiplexing is faster than
the real-time digital sampling of the GPS signals by a factor of
N
, where
N
is the
number of channels sharing the same device. Since there is no loss of energy, there is







Search WWH ::

Custom Search