Global Positioning System Reference
In-Depth Information
Degrees
Holding
register
(binary)
SIN
map
(sign magnitude)
COS
map
(sign magnitude)
π
/2
360°/K
0
1 0 0...
000
011
45
1 0 1...
010
010
90
1 1 0...
011
000
π
0
135
1 1 1...
010
110
180
0 0 0...
000
111
225
0 0 1...
110
110
270
0 1 0...
111
000
3/2
π
315
0 1 1...
110
010
J
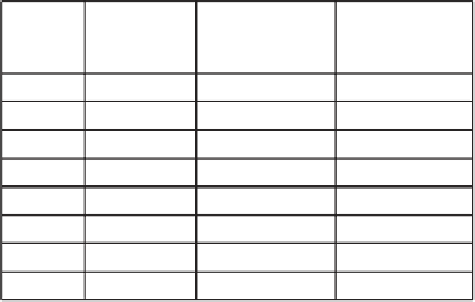
Maps forJ=3,K=2 =8
Notes:
1. The number of bits, J, is determined for the SIN and COS outputs. The phase plane of 360 degrees is
subdivided into 2 = K phase points.
2. K values are computed for each waveform, one value per phase point. Each value represents the
amplitude of the waveform to be generated at that phase point. The upper J bits of the holding register
are used to determine the address of the waveform amplitude.
3. Rate at which phase plane is traversed determines the frequency of the output waveform.
4. The upper bound of the amplitude error is 2
J
Π
K.
5. The approximate amplitude error is: 2
K cos
(t), where
(t) is the phase angle.
Π
φ
φ
Figure 5.7
Digital frequency synthesizer design.
though the carrier has been downconverted to IF and the NCO carrier bias is set to
the IF, the carrier Doppler effect remains referenced to L-band.) The scale factor
that compensates for this difference in frequency is given by:
R
f
Scale factor
=
c
(dimensionless)
(5.1)
L
where:
R
c
=
spreading code chip rate (Hz) plus Doppler effect
=
R
0
for P(Y) code
=
10.23 Mchip/s
+
P(Y) Doppler effect
=
R
0
/10 for C/A code
=
1.023 Mchip/s
+
C/A Doppler effect
f
L
=
L-band carrier (Hz)
=
154
R
0
for L1
=
120
R
0
for L2
Table 5.1 shows the three practical combinations of this scale factor.
The carrier loop output should always provide Doppler aiding to the code loop
because the carrier loop jitter is orders of magnitude less noisy than the code loop
and thus much more accurate. The carrier loop aiding removes virtually all of the
LOS dynamics from the code loop, so the code loop filter order can be made
smaller, its update rate slower, and its bandwidth narrower than for the unaided
case, thereby reducing the noise in the code loop measurements. In fact, the code
loop only tracks the dynamics of the ionospheric delay plus noise. When both the















Search WWH ::

Custom Search