Information Technology Reference
In-Depth Information
to improve safety, accuracy, as well as reduction in radiation exposure. Well-de
ned
geometric accuracy goals [
6
] that prevent damage to the spine or peripheral nerves can
be used for equivalent safety and ef
cacy evaluation. Large surgical volumes in
procedures such as vertebroplasties, fusions, and biopsies and other spinal procedures
[
7
,
8
] strengthen the corresponding business cases for any devices.
1.1 Background
Robotics research in surgery is now several decades old (Fig.
2
). The
first wide-
spread clinical robotic application was the ROBODOC system robot designed for
automated milling of the hip cavity for implant placement in a hip replacement
surgery [
9
]. This automation was particularly well received by users. While 10,000s
of procedures were performed when the system was in active use, the lack of
ef
cacy data for comparison with convention practice, and improvements in con-
ventional treatment options, lack of FDA clearance, among other reasons withheld
the system from reaching its full potential.
A version of the system has recently received FDA clearance for milling of the
implant cavity for hip surgery. ROBODOC Applications were also extended to
include other joint reconstruction such as the knee, the domain of later more suc-
cessful applications such as MAKOplasty. An integration workstation (Fig.
1
)
provided the registration and the user interface between the surgeon and the robot.
The corresponding ORTHODOC planning software was designed to help a surgeon
to graphically position a CAD model over a patient
s CT scan.
Registration determined the intra-operative spatial relationships between surgical
instruments held by the robot, pre-operative CT imaging and the milling plan and
the anatomy. Implanted pin
'
fiducials, and later intra-operative surface digitization
using a robot held digitizer was used for robot/CT/bone surface registration.
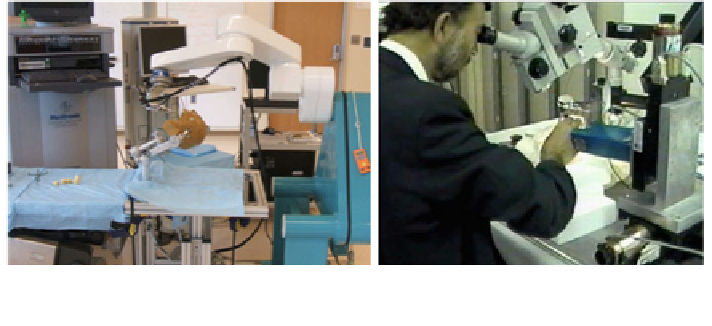
Fig. 2
Examples of research systems: a NEUROMATE (Integrated Surgical Systems, Inc.)
neurosurgical experimental setup at the Johns Hopkins University (left), and a user manipulating
the first generation