Information Technology Reference
In-Depth Information
on tracked ultrasound images. The method is very simple, the computation is
immediate, and usually accurate enough, but
finding the corresponding anatomical
locations on different imaging modalities requires experience. Although there have
been promising attempts to automate this process by image-based registration.
Automatic methods may require less skills from the users and might be more
accurate (by matching large number of points or surface patches), but so far these
methods do not seem to be able to match the speed, simplicity, and robustness of
the manual registration method.
Computation of the NeedleTip to Needle transform is straightforward, typically
performed using a simple pivot calibration. The tracked needle is pivoted around its
tip for a couple of seconds and the transform that minimizes the dislocation of the
needle tip is computed. Usually the calibration has to be performed only once for
each needle type that may be used in the procedure.
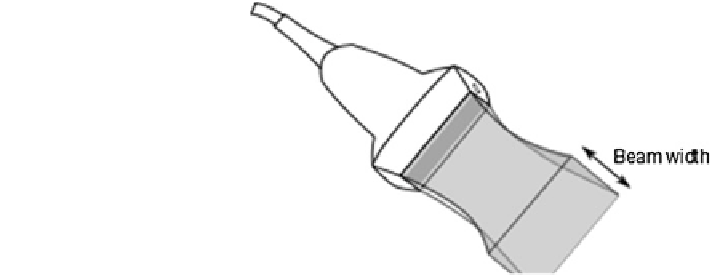
Determining the Image to Transducer transform (also known as probe cali-
bration) accurately is a dif
cult task, mostly because of the 3D point localization by
ultrasound is inherently inaccurate, due to the
of the ultrasound beam
(Fig.
4
). Beam width causes objects to appear in the ultrasound image that are
several millimeters away from the ideal imaging plane and blurring of object
boundaries on the images.
The Image to Transducer transform can be determined by moving a tracked
pointing device (such as a needle or stylus) to various points in the image and
recording the pointer tip position in both the Transducer coordinate system and the
Image coordinate system (Fig.
5
). The transform can be determined by a simple
landmark registration. The advantages of the method are that it is simple, reliable,
requires just an additional tracked stylus, and can be performed in any medium
where a needle can be inserted. However, positioning the pointing device
“
thickness
”
'
s tip in
the middle of the image plane and
finding the tip position in the image requires an
experienced operator and therefore the accuracy and speed of the calibration heavily
depends on the operator.
Automatic methods have been proposed to reduce the operator-dependency and
increase the accuracy of the probe calibration. These methods extract features (such
Fig. 4 Anything inside the
thick ultrasound beam will
appear in the acquired
ultrasound image