Information Technology Reference
In-Depth Information
6 System Calibration
Ultrasound imaging differs signi
cantly from other imaging modalities traditionally
used in image-guided interventions. Both the contents and the positions of ultra-
sound images change rapidly in time, while CT and MRI images have static content
and well-de
ned positions. Therefore ultrasound tracking requires special practices
to ensure a maintainable navigation software design. We describe the coordinate
systems that need to be represented in tracked ultrasound systems, and best prac-
tices in
finding the transformations between the coordinate systems. In other words,
we discuss calibration between components of the system.
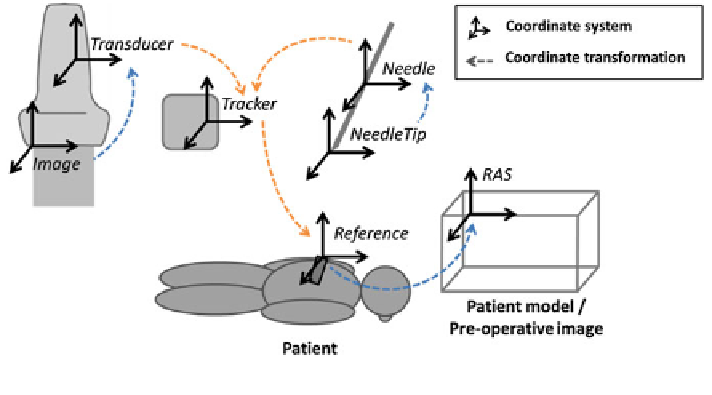
In a full featured navigation system, there are three dynamic and three static
coordinate transformations (Fig.
3
). The dynamic transformations are shown in
orange color, and the static ones in blue. The dynamic transformations change
rapidly as the tracking sensors move relative to the Tracker coordinate system. The
Tracker coordinate system is most commonly the electromagnetic
field generator.
The static transformations are equally important, but they do not change signifi-
-
cantly during the intervention.
All transformation chains eventually end in a common Right-Anterior-Superior
(RAS) anatomical coordinate system. When a CT or MRI image is loaded in the
needle navigation scene, their RAS coordinate system is used. In ultrasound-only
cases, the RAS can be de
ned at an arbitrary position with the coordinate axes
directions matching the patient anatomical directions.
Spatial calibration of the system entails the computation of the static transfor-
mations. Reference to RAS transform is typically obtained by landmark registration.
In this method the transform is determined by minimizing the difference between
points de
ned in the pre-procedural CT or MRI image and the same points marked
Fig. 3 Coordinate systems and transformations in a tracked ultrasound-guided needle navigation
scene