Information Technology Reference
In-Depth Information
needle usually has to go through a narrow space. Therefore, spinal interventions
require more freedom of motion of both the transducer and the needle, so
mechanical needle guides are typically not suitable for these procedures. Optical
and electromagnetic position tracking, however, allows any position and angle of
the needle relative to the ultrasound transducer. Using the tracked position infor-
mation, navigation software can display the needle relative to the ultrasound image
in real time.
5 Hardware Components
Experimental tracked ultrasound systems have been studied for over a decade in
spinal needle guidance applications. But the
first products approved for clinical use
only appeared recently on the market. In this section we describe the architecture of
tracked ultrasound systems in general, and how research prototypes can be built
from low-cost components.
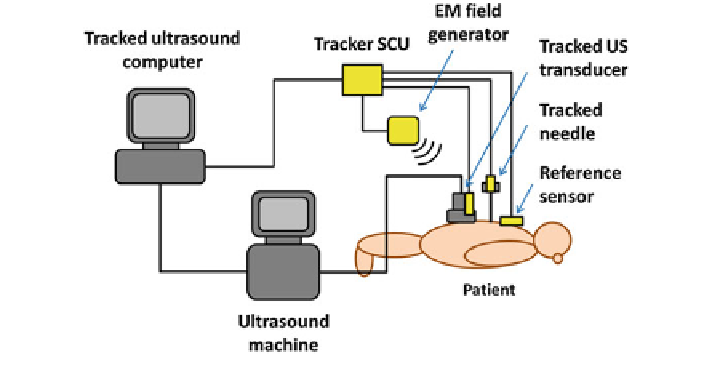
Tracked ultrasound hardware systems are composed of a conventional ultra-
sound machine and an added position tracker. In an experimental setting, there is
often a dedicated computer for tracked ultrasound data processing, because ultra-
sound machines either restrict installation of research software or their hardware is
not powerful enough for running additional applications. We will discuss a system
design with a dedicated computer for our research application, because it can be
easily built from existing components in any research laboratory (Fig.
1
).
The majority of tracked ultrasound systems use electromagnetic technology for
position tracking. Although optical tracking can also be used, the line of sight often
breaks when the transducer is moved around the patient. This causes loss of
Fig. 1 Schematic layout of tracked ultrasound systems using electromagnetic (EM) position
trackers