Information Technology Reference
In-Depth Information
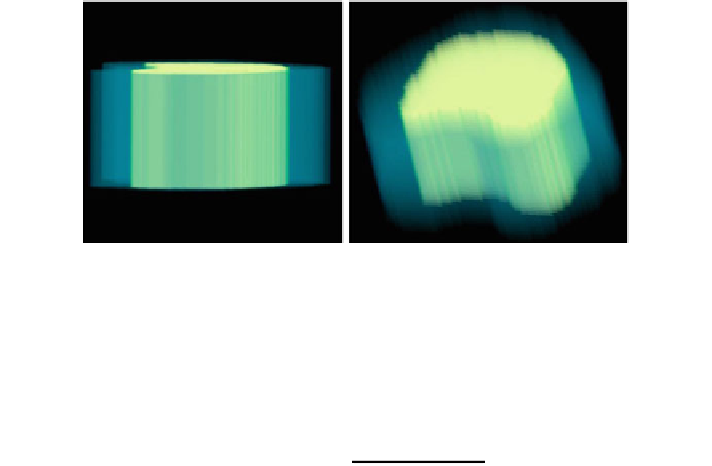
Fig. 13 The shape model is shown in 3D (when propagating 2D shape model into 3D). The outer
volume represents the variability region, the inner volume represents the object region
P
i¼1
H
ð/
i
ð
x
ÞÞ
p
ð
d
x
j
f
x
¼
1
Þ
¼
;
ð
19
Þ
N
P
i¼1
H
ð/
i
ð
ÞÞ
x
p
ð
d
x
j
f
x
¼
0
Þ
¼
:
ð
20
Þ
N
3D representation of the shape model is shown in Fig.
13
. It should be noted that
Eqs. (
19
) and (
20
) represents the probability value at each pixel, x.
2.4.4 Initial Segmentation
To estimate the initial labeling f
, the ICM method which integrates the intensity
and spatial interaction information is used. It should be noted that the shape model
has not been used in this process. The initial segmented region is used to obtain the
SDF representation which is required in the registration process. An example of the
initial labeling is shown in Fig.
14
. The method has acceptable results, because a
relatively large amount of pedicles and ribs are separated from the vertebral body. It
should be noted that there may still some portion of pedicles and ribs which could
not be separated. Between Fig.
14
d, e, there is a shape registration process which is
shown in Figs.
15
and
16
.
2.4.5 Embedding the Shape Model
To use the shape prior in the segmentation process, f
and the shape prior are
required to be registered. The shape model has a variability region as shown in
Fig.
12
a. The outer contour is represented as J. In the registration process, J and f
will be the source and target information, respectively. The registration step is done
in 2D slice by slice since the shape model can deform locally independently from