Information Technology Reference
In-Depth Information
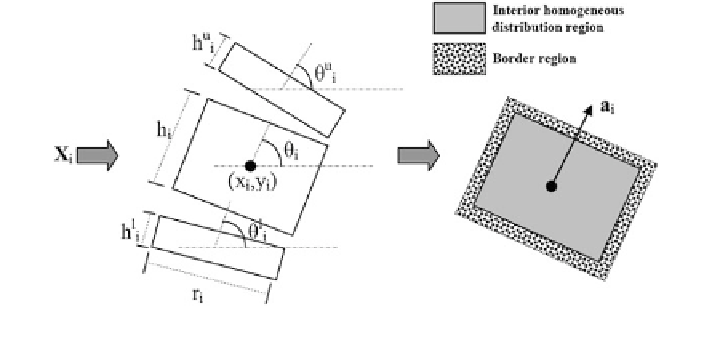
Fig. 2 A schematic view of the vertebral body template for the component observation model
the con
guration Xi
i
of the node Vi
i
match the observed image(s) I and the
potential p X
i
;
encodes the geometrical constraint between components. The
X
j
identi
cation of
the
spinal
structure
is
then to
nd the
con
guration
X
¼f
X
0
;
X
1
; ...;
X
i
; ...;
X
N
1
g
, that maximizes.
Y
Y
:
p
ð
X
j
I
Þ/
p I
j
X
i
ð
Þ
p X
i
;
X
j
ð
1
Þ
i
e
i
;
j
¼
1
2.2 Component Observation Model
The component observation model p I
is to match a template, which is
determine by Xi,
i
, with the observed image(s) I. We de
ð
j
X
i
Þ
ne our component obser-
vation model as:
p I
ð
j
X
i
Þ¼
p
I
I
ð
j
X
i
Þ
p
G
I
ð
j
X
i
Þ
p
V
I
ð
j
X
i
Þ:
ð
2
Þ
The three items in Eq. (
2
) come from the intensity, gradient and local variance of
the template as detailed below:
Intensity observation model p
I
I
j
X
i
: The intensity observation model repre-
sents the probability that the parameterized model of Vi
i
with the correspondent
parameter set X
i
ð
Þ
fits the appearance of the observed image(s) I. Each Xi
i
determines a disc-vertebra-disc template as shown in Fig.
2
. We assume that the
interior area of the vertebral body has a homogeneous intensity distribution
modeled as a Gaussian distribution
Nðli;
i
; r
i
Þ
. While the border region, which is
de
ned as a small neighborhood outside the vertebral body as shown in Fig.
2
,is
assumed to obey a different intensity distribution from the interior area of the
vertebral body. For each pixel s that falls in the interior and the border region of