Information Technology Reference
In-Depth Information
þ a
X
X
X
n
m
o
2
S
R
1
S
T
p
i
;
j
;
k
p
i
;
j
;
k
2D
C
ð
S
Þ
¼
2D
ð
S
Þ^
;
ð
14
Þ
i
¼
1
j
¼
1
k¼
1
where
a
is the relative weight of the anatomical landmark error with respect to the
prior spine shape knowledge. If identi
cation errors come from a Gaussian distri-
bution with known variance and the departures from the Fr
chet mean can be
approximated by another Gaussian distribution, then
a
can be chosen to obtain the
maximum a posteriori. However, the distribution and variance of the identi
é
cation
errors are rarely known in advance, and
a
has to be adjusted manually. A non-linear
optimization is then performed to estimate the best articulated model given
p
i
;
j
;
k
2D
.
The initial solution from which the optimization procedure starts can be provided
by a direct linear transform.
To illustrate the bene
^
ts of this approach, we numerically simulated a radio-
graphic setup with a posterior
anterior and a lateral radiograph. A set of six ana-
-
tomical
ed in the radiographs and
corrupted using different noise levels. The conventional DLT (direct linear trans-
form) algorithm was applied to the noise corrupted correspondences, as well as the
algorithm summarized by Eq. (
14
). The procedure was repeated for 50 spine models
for each noise level.
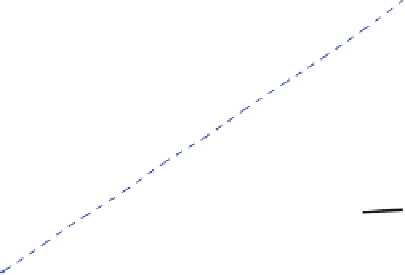
The results of the simulations are shown in Fig.
11
. It appears that the methods
yield comparable results when the errors on the correspondences are low. The direct
linear method even seems to enjoy a small advantage, which may have to do with
the articulated reconstruction being prone to reach a local minimum with low noise
levels. However, the articulated reconstruction appears to cope better with high
levels of noise. The reconstruction errors obtained with the articulated recon-
struction method were better when the standard deviation of the noise was more
than approximately 3 pixels.
landmarks per vertebra were then identi
Fig. 11 Three-dimensional
reconstruction performed by
applying direct linear
transform to corresponding
image coordinates and by
maximizing the posterior
probability of the articulated
model
6
Direct Linear Transform Error
Direct Linear Transform Error +
σ
Articulated Reconstruction Error
Articulated Reconstruction Error +
σ
5
4
3
2
1
0
0
2
4
6
8
10