Information Technology Reference
In-Depth Information
z
z
= (0,0,1)
n
y
y
ˀ
4
=
ʸ
x
x
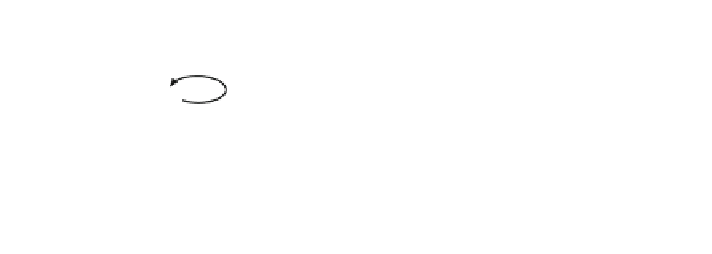
Fig. 3 Rotation vector is de
ned as a rotation of
radians around an axis of rotation n and
θ
n
represented as their product (
h
)
k
n
k
A rotation vector can be converted into a rotation matrix using Rodrigues
'
formula:
S
2
R
¼
I
þ
sin
ðhÞ
S
ð
n
Þþð
1
cos
ðhÞÞ
ð
n
Þ
ð
1
Þ
2
4
3
5
:
0
n
z
n
y
n
z
0
n
x
where
S
ð
n
Þ
¼
n
y
n
x
0
It is also possible to compute the rotation vector from a rotation matrix using the
following equations:
R
T
Tr
ð
R
Þ
1
R
h
¼
arccos
ð
Þ
and
S
ð
n
Þ
¼
ðhÞ
:
ð
2
Þ
2
2 sin
Let
!
be an alternate representation of rigid transformation T that uses the
rotation vector instead of a rotation matrix; thus,
!
¼
f
;
g
r
t
. One of the main
advantages of this representation is that it enables us to de
ne a left-invariant
T
!
;
T
!
Þ
¼
T
!
T
!
;
T
!
T
!
Þ
distance (dðT1!;
ð
d
ð
) between two rigid transformations. This
distance is defined as follows:
T
!
;
T
!
Þ
¼
T
!
1
T
!
Þ
d
ð
N
k
ð
ð
3
Þ
!
Þ
2
2
2
2
with: N
k
ð
¼
N
k
ðf
r
;
t
gÞ
¼
kk
r
þ k
t
kk
:
The parameter
k
makes it possible to change the relative importance of rotational
changes in comparison to translational changes. It is a parameter worth considering
carefully, because the rotation and translation are measured in different units. It
would be easy to almost completely discard one in favor of the other without a well
chosen value. In our experience, choosing a value that leads to variabilities that are
approximately equally distributed in the translational and rotational parts of the
transformations works well for descriptive studies.