Information Technology Reference
In-Depth Information
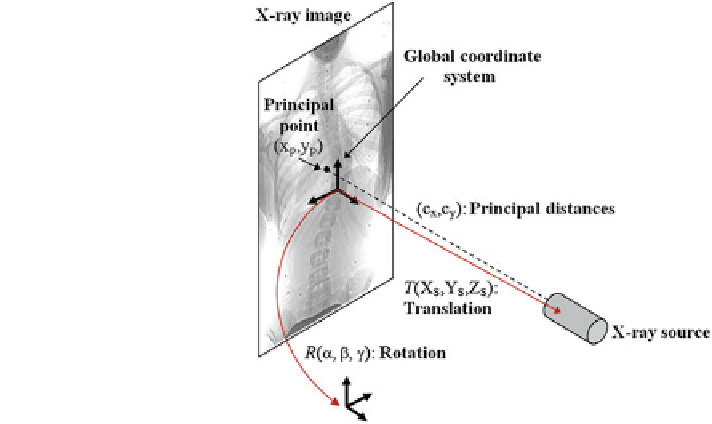
Fig. 8 Illustration of the ten
geometric parameters
described within the context
of the X-rays
the principal point and c
x
i
, c
y
i
as the principal distances. These parameters are
described schematically in Fig.
8
. A rough estimation of these parameters is
extrapolated from a small object of known dimensions taken in the radiographic
scene [
28
]. Hence the geometrical parameters
n
i
¼
ð
x
p
i
, y
p
i
;
c
x
i
;
c
y
i
; a
i
; b
i
; c
i
;
X
S
i
;
Y
S
i
;
are subsequently updated based on an iterative nonlinear optimization
process with regards to the global shape of the spine, following the objective
function:
Z
S
i
Þ
X
2
E
global
ðnÞ
¼
E
visualhull
ðn
i
Þþb
E
torsion
ðn
i
Þ:
ð
4
Þ
i¼1
rst component
maximizes the intersected region between the segmented silhouette and the pro-
jection of the shape of the spine computed by the visual hull 3D reconstruction, and
minimizes isolated regions such that:
This cost function combines two image-based criterions. The
ZZ
ZZ
s
i
s
i
E
visualhull
ðn
i
Þ
¼
ð
u
i
;
v
i
Þ
du
i
dv
i
ð
u
i
;
v
i
Þ
du
i
dv
i
ð
5
Þ
X
i
P
i
P
i
ð
S
Þ
ð
S
Þ
where s
i
is the segmented silhouette on image plane i,
P
i
is the projection
of the global visual hull shape S, and
X
i
the image plane domain de
ð
u
;
v
Þ
ð
S
Þ
ned in the
ð
space. The second component evaluates the difference between the back-
projection of the equidistant 3D Frenet frames taken at j
u
;
v
Þ
=
N intervals along the 3D
spinal curve C
k
ð
u
Þ
and the 2D curves
a
i
ð
s
Þ
of the X-ray images: