Game Development Reference
In-Depth Information
Figure 4-11.
The center of mass can lie outside of an object.
Rigid Body Motion Coordinate Axes
The translational motion of an object can be modeled by treating the object as a particle located
at the center of mass of the object. Any external forces on the object are assumed to act through
the center of mass. The rotational motion of the object can be modeled by assuming that every
part of the object moves in a circular motion about the axis of rotation.
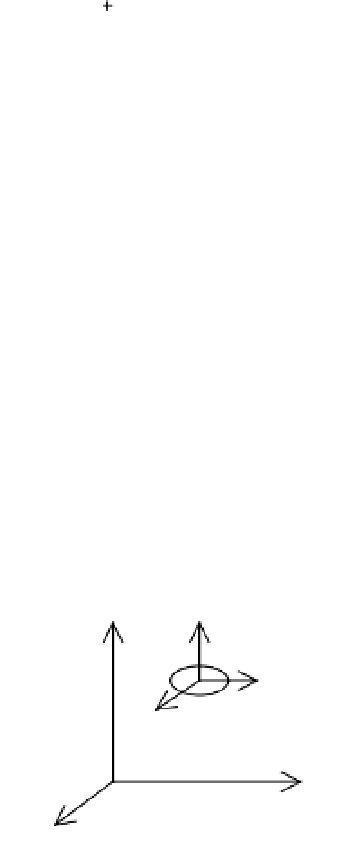
Because the translational and rotational motions are treated independently, it is often
convenient to use two sets of coordinate axis, one to describe the translational motion and one
to characterize the rotational motion. Figure 4-12 shows a football flying through the air. The
translational motion of the object is typically evaluated relative to a fixed point in space, and
the xyz coordinate axes for translational motion originate from this fixed point. The rotational
motion is usually described using coordinate axes x
that move with the body as it flies
through the air. The rotational coordinate axes are generally taken to originate at the center of
mass of the object.
′
y
′
z
′
Figure 4-12.
The six coordinate axes for analyzing rigid body motion
Rolling Motion
To demonstrate the process of analyzing rigid body kinematics, let's look at two typical problems.
A common problem in rigid body motion is to characterize the translational and rotational
motion of an object that is rolling on a surface. Consider a solid object rolling down a ramp as
shown in Figure 4-13. The figure shown is a cylinder, but let's consider the general case of any
rolling object.