Game Development Reference
In-Depth Information
Modeling the Golf Ball in Flight
The impact with the golf club determines the initial velocity (both angular and translational) of
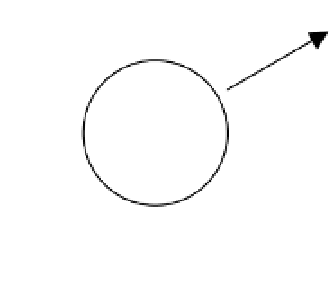
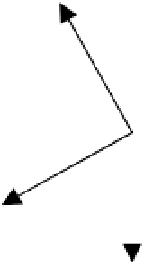
the golf ball. Once the ball is in flight, it behaves like a projectile. The force diagram for the golf
ball is shown in Figure 7-6. It will experience acceleration in the vertical direction due to Earth's
gravity. Aerodynamic drag and wind will affect the flight of a golf ball, as will the Magnus force
due to spin, so these effects will have to be incorporated into the physical model. In Figure 7-6,
the golf ball is spinning in the counterclockwise direction (i.e., backspin), so the Magnus force
will be directed upward.
Figure 7-6.
Force diagram for a golf ball in flight
The basic governing equations and modeling ideas for all of the forces experienced by a
golf ball were covered in Chapter 5, but we will spend a little time discussing how to model the
Magnus force on a golf ball.
Computing the Magnus Force for a Spinning Golf Ball
In Chapter 5, you learned how a spinning object generates a lifting force known as Magnus
force. Golf balls can have very high spin rates, so the effects of the resulting Magnus force must
be included in a golf simulation. In Chapter 5, an equation was developed that represented the
Magnus force generated by a spinning object as a function of the density of air,
r
, the frontal
area of the object,
A
, the square of the velocity magnitude,
v
, and a quantity known as the lift
coefficient,
C
L
.
1
2
2
FCv A
=
r
(7.21)
M
L
The density, velocity, and frontal area of the golf ball are readily obtainable, but what value
should be given to the lift coefficient? The simplest approximation, and the one predicted by
the Bernoulli equation, is to set the lift coefficient for a sphere equal to the ratio of the radius
multiplied by the angular velocity divided by the translational velocity.
r
w
C
=
(7.22)
L
v