Biomedical Engineering Reference
In-Depth Information
6
4
2
0
Recursive-form
Closed-form
-2
-4
0.0
0.1
0.2
0.3
0.4
Time (Normalized)
0.5
0.6
0.7
0.8
0.9
1.0
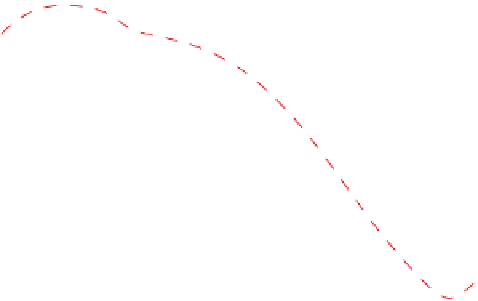
FIGURE 4.10
Sensitivity results of the joint torques comparison at the optimal design.
External forces and moments are systematically included in the recursive for-
mulation. Although recursive, Newton
Euler also gives linear computational
complexity with respect to the number of DOFs; recursive Lagrangian formula-
tion is of higher efficiency and simplicity in calculating joint torques since the
internal force calculation is avoided.
The examples of trajectory planning and the arm lifting motion of a model of
a 2-DOF arm were solved for motion prediction. These simple examples illustrate
the power and potential of using optimization with dynamics to “predict” human
motion, as will be explored more in the next chapter.
In later chapters we will use the same idea with more complex motions, such
as walking and lifting, for a full model of a human with substantially increased
DOFs.
References
Bessonnet, G., Lallemand, J. P., 1990. Optimal trajectories of robot arms minimizing con-
strained actuators and travelling time. In: Robotics and Automation, 1990. Proceedings,
1990 IEEE International Conference. pp. 112
117.































































Search WWH ::

Custom Search