Biomedical Engineering Reference
In-Depth Information
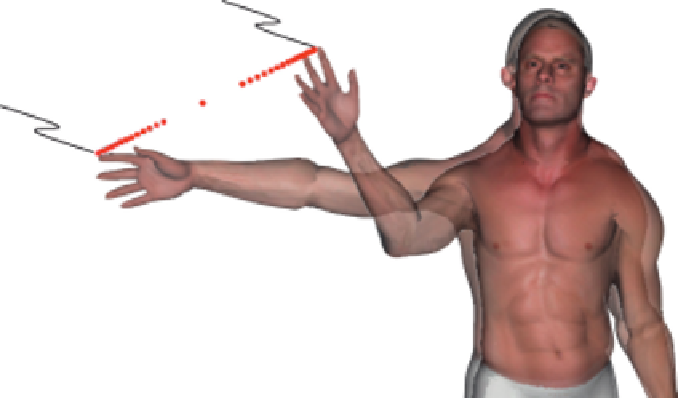
Final point
and posture
Initial point
and posture
FIGURE 3.9
Posture predicted using initial and final points on the Cartesian path.
3.8
Motion between two points
Motion prediction is defined as calculating the joint variables versus time
for each joint during motion of a kinematic skeleton from one point to another.
The curve representing joint variables versus time is also called joint profiles.
In order to calculate the joint profiles in motion prediction, the initial and
final value for each joint q
i
must be known. Given a Cartesian path for the end-
effector, these values are determined by running posture prediction for both the
initial and final points along the path (
Figure 3.9
).
3.9
Joint profiles as B-spline curves
Joint profiles are defined as the curve of joint angle versus time. Indeed, each
joint can be made of one or more DOF. Therefore, while we use the term joint
profiles, each profile is indeed for each independent DOF.
Motion prediction involves finding joint profiles for each DOF in a kinematic
model. While a motion is never discreet, it is important to have discrete points repre-
senting the joint profile. Therefore, we first introduce a “B-spline curve” as a linear
combination of B-spline basis functions. B-spline curves are an ideal choice because
they can be chosen to allow continuity, differentiability, and endpoint interpolation.
Furthermore, B-spline curves give local control; hence, changing one coefficient





Search WWH ::

Custom Search