Biomedical Engineering Reference
In-Depth Information
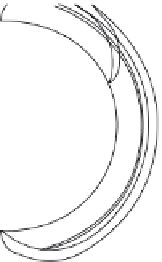
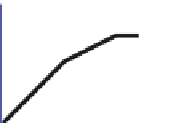
FIGURE 3.4
The computed posture is shown within the boundary of the workspace.
To predict a posture at this position p with the given orientation, we imple-
ment the minimum effort cost function given by:
X
n
i
5
1
γ
i
ð
q
i
2
q
initial
i
2
f
Effort
ð
q
Þ
5
Þ
(3.6)
where
γ
i
is a weight assigned to each joint and is comparable to w
i
.
The computed joint angles for the final posture are
q
5
[0.78
π
/180 0.39
/180]
T
. The posture is schematically represented in
Figure 3.4
. The
boundary of the workspace of all points in space that can be touched by the end-
effector is also shown. This workspace is also called the reach envelope.
Computational and closed-form methods for determining the reach envelope for
humans was provided by Abdel-Malek et al. (2001a
d, 2004a
d).
π
/180 0.39
π
3.7
Development of human performance measures
The objective functions in the final optimization formulation represent human
performance measures. In this section, we first describe joint displacement, which
is based on work by Jung and Choe (1996) and
Yu (2001)
. We explain how this
performance measure can be modified to represent effort. We then introduce addi-
tional performance measures.
It has been suggested that each DOF, or each body segment, should be associ-
ated with an individual objective function or component that may be considered
in the final performance measure (Zacher and Bubb, 2004). Several performance
measures will also be used as multi-objective optimization problems towards pre-
dicting postures.






















Search WWH ::

Custom Search