Biomedical Engineering Reference
In-Depth Information
x
3
L
5
L
7
z
4
L
9
x
4
z
2
z
o
x
6
z
1
x
7
z
9
z
8
z
3
x
2
x
5
x
1
x
o
z
6
z
5
x
8
x
9
z
7
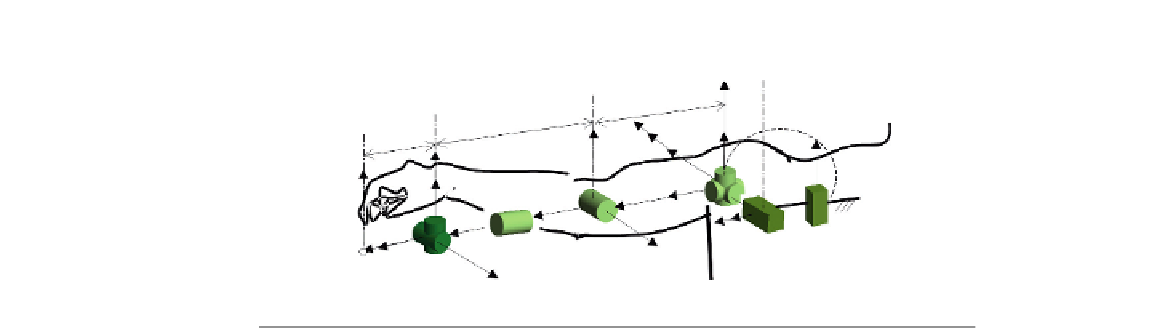
FIGURE 2.21
Locating the coordinate systems for the 9-DOF model of the upper extremity.
In general, the kinematic equations of serial
n
-DOF segmental links relating
the coordinates of the last link (the
n
th
coordinate frame) with respect to the world
coordinates system (the 0
th
coordinate frame) can be written as
i
0
0
T
1
1
i
1
j
1
T
2
:::
2
2
T
j
for
i
;
; ...;
n
T
i
5
T
i
5 L
5
1
2
(2.52)
j
5
1
9), the position and orien-
tation of the 9
th
link with respect to the base frame (the first frame) is represented by:
For example, for a 9-DOF model of the upper limb (
n
5
0
T
1
1
8
0
T
2
...
T
9
5
T
9
(2.53)
If
m
2
1
and
m
are the extended position vectors of a point, referred to coordi-
nate frames embedded in link
m
x
x
1 and
m,
respectively, the relationship between
2
the two vectors is given by
m
2
1
m
2
1
T
m
m
x
5
x
(2.54)
Similarly, a vector resolved in the coordinates of the hand (
n
) can be resolved
in the world coordinate system by multiplying by the corresponding transforma-
tion matrix as
v
0
0
T
n
n
v
5
v
(2.55)
where the vector
0
v
is resolved in the world coordinate frame.
2.10.2
Example: DH parameters of the lower limb
Consider the lower limb shown in
Figure 2.22
. For the purpose of this example, a
total of four DOF are used to model the limb.
a.
Determine the coordinate systems and sketch on the figure
b.
Determine the DH table
c.
Write down the matrices relating any two consecutive coordinate systems
d.
Write down the matrix relating the first link to the coordinate system
embedded in the foot.
Search WWH ::

Custom Search