Biomedical Engineering Reference
In-Depth Information
Optimization-based Posture Prediction
Minimize:
Joint Displacement
1. Determine:
Joint Angles
2. Minimize:
Joint Displacement and
Visual Displacement
½ Visual Displacement
½ Joint Displacement
3. Subject to:
—Joint Limits
—Physical constraints
—Other constraints
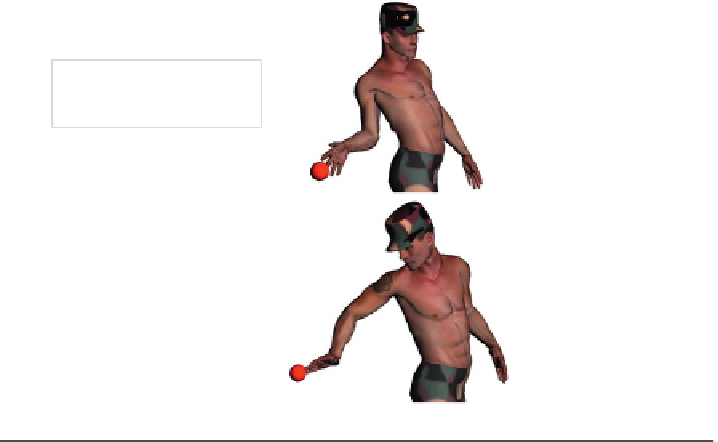
FIGURE 1.1
Santos
s
the human model reaches to a point using two different strategies as a result of
predicting postures.
approach yields natural human motion, induces behavior, and provides for a
straightforward method of “predicting” the dynamics of the motion.
Figure 1.2
depicts the general optimization-based algorithm. The goal is to
determine joint profiles, meaning the angles subtended by each body segment as
a function of time. The second optimization formulation ingredient is one or more
cost functions. In this case, we have selected energy and effort, assuming that
both of these human performance measures can be transcribed into mathematical
functions. The third ingredient is the same as shown in
Figure 1.1
; however, we
have added an additional important constraint, namely the equations of motion.
These are the laws of motion that govern how our world behaves dynamically.
In general, we consider any case where a human segment is undergoing
motion that warrants the consideration of masses and moments of inertia. PD can
incorporate such general cases.
1.3
Why data-driven human motion prediction does
not work
We firmly believe that the data-driven approach to human motion prediction is
the wrong approach. Thousands of experiments are typically done to capture a
few motions. These motions are then compiled into large tables with many para-
meters. The data is then analyzed and modeled as a nonlinear or functional



Search WWH ::

Custom Search