Biomedical Engineering Reference
In-Depth Information
10
c
3
Camera
O
C
c
1
S
2
O
s
15
c
2
S
3
Shoulder
S
1
O
J
24
Joystick
O
J
J
3
J
2
5
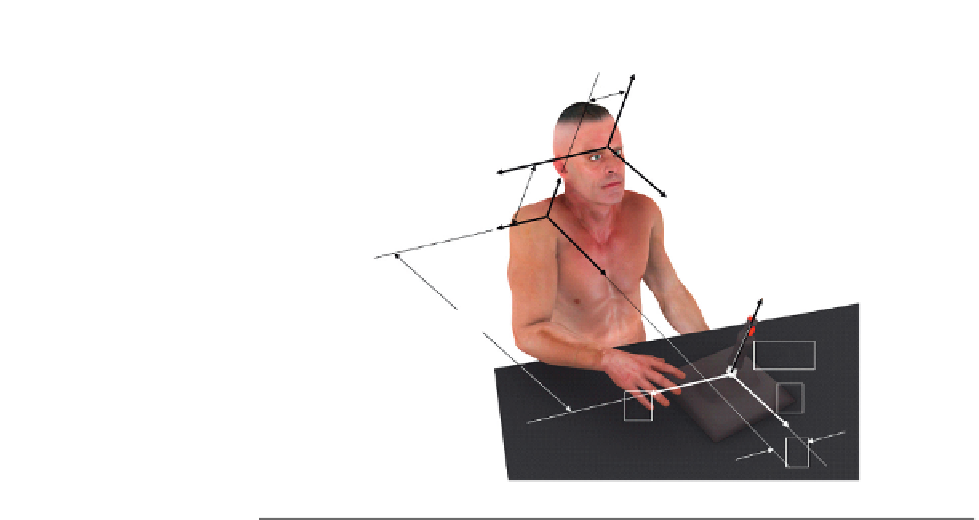
FIGURE 2.11
Orienting the hand to grasp an object.
then vector bases at
O
C
are given by
⎡
0
1
0
⎤
⎢
⎥
[
]
(2.39)
j
j
j
=
0
0
1
⎢
⎥
1
2
3
⎢
⎥
1
0
0
⎣
⎦
which can readily be drawn at
O
J
with respect to the video camera coordinate sys-
tem and are shown in
Figure 2.11
. Similarly,
the unit basis
[
]
are
s
s
s
1
2
3
extracted from
C
T
S
and are plotted as shown in Figure 2.11.
With regards to (iii) above, the coordinates of the joystick origin relative to
the shoulder coordinate frame
S
S
(i.e., seeking the vector
p
SJ
) can be either read
T
S
or calculated numerically from
S
from
Figure 2.12
as
p
SJ
5
24
0
2
5
T
J
,
which can be written as
S
S
T
C
C
T
J
5
T
J
(2.40)
Since only
S
T
C
is given, its inverse is computed as
2
4
3
5
010 0
001 5
100
T
S
2
1
S
C
T
C
5
5
(2.41)
10
000 1
2







Search WWH ::

Custom Search