Biomedical Engineering Reference
In-Depth Information
A
Left foot
M
GRF
F
GRF
e
1
ZMP
e
2
y
x
Right foot
B
o
z
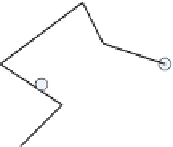
FIGURE 8.3
Partition of the GRF into two feet: e
1
and e
2
are distances between ZMP and feet ball centers.
w
h
2
h
1
d
2
d
1
FIGURE 8.4
Definition of input parameters for lifting task.
formulation. In this regard,
h
1
is the initial height of the box measured from the
ground,
d
1
is the initial distance measured from the foot location to the center of
the box,
h
2
is the final height measured from the ground,
d
2
is the final distance,
and
w
is the weight of the box. The initial and final postures and dynamic lifting
trajectory are determined by solving a nonlinear optimization problem. The
mechanical system is at rest at the initial and final time points.
8.5
Predictive dynamics optimization formulation
The lifting motion is predicted by solving a multi-objective optimization problem.
In the proposed formulation, the box initial and final locations, feet locations and
orientations, and box dimension and weight are given. The total time
T
for the




















































































Search WWH ::

Custom Search