Biomedical Engineering Reference
In-Depth Information
100%+
75-
100%
50-
75%
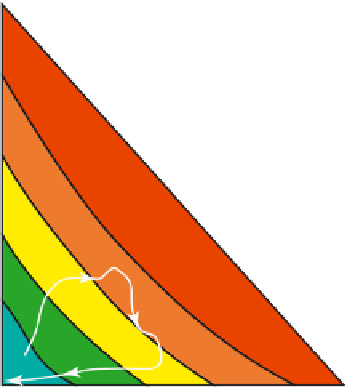
Torque
profile
from
predictive
dynamics
25-
50%
0-25%
Angular Velocity (deg/sec)
Angle
FIGURE 6.10
Torque-velocity results from predictive dynamics are compared with extrapolated torque-
velocity curves (surfaces).
process may be relatively straightforward involving simply confirming whether a
“straight” knee is defined as 0 or 180 degrees and matching the sign conventions
between the DH model and the normative data. However, for 3-DOF joints (or more),
such as the hip, trunk, or shoulder, this process is complicated by computational
issues, such as gimbal lock, and measurement issues such as separating net joint torque
into the underlying DH joints. For example, shoulder torque is typically assessed as
net flexion/extension, abduction/adduction, internal/external rotation, and possibly hor-
izontal abduction/adduction. However, these torques occur due to muscular torques
about both the glenuhumeral and scapulothoracic joints.
Depending on the DH model, it may be challenging to discern which joints
should be compared with which normative data values, or if some load sharing
paradigm must be assumed between the joints involved. Similarly, trunk strength
is frequently assessed as a single entity in physiological measurements (e.g., net
trunk extension torque), yet clearly there are multiple spinal joints involved.
However, the muscles involved span several joints and cannot be isolated to only
a single joint (L4-L5 verses L5-S1, for example). Thus, assumptions must be
made to enable strength mapping between experimental, normative data and
DHM, and errors associated with gimbal lock must be noted.







Search WWH ::

Custom Search