Biomedical Engineering Reference
In-Depth Information
Shoulder flexion
Shoulder extension
100
90
80
70
60
50
100
90
0
0
0
50
80
80
70
70
60
60
40
30
20
10
40
30
20
10
50
40
30
20
50
40
30
20
50
100
150
200
50
100
150
200
50
100
50
100
150
200
40
40
40
40
80
80
80
80
150
200
90
90
90
90
100
100
100
100
120
120
120
120
140
140
140
140
40
35
30
25
40
35
30
25
40
35
30
25
20
15
10
5
20
15
10
5
20
15
10
5
50
100
150
50
100
150
50
100
50
100
150
200
40
40
80
80
90
90
40
40
100
200
100
80
200
80
120
90
140
100
120
140
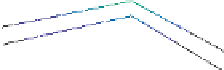
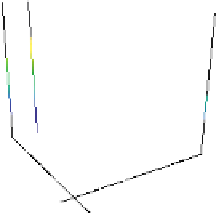
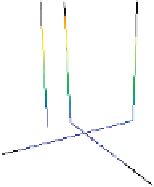
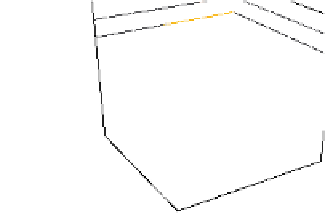
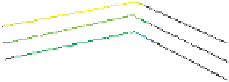
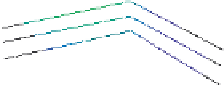
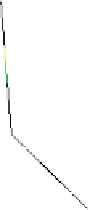
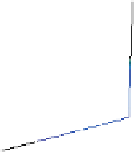
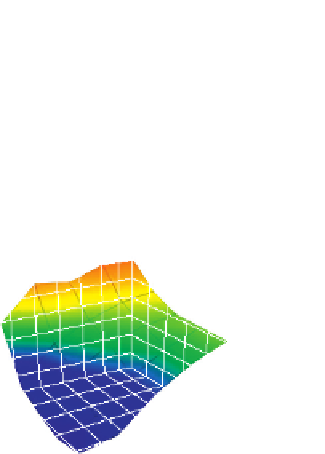
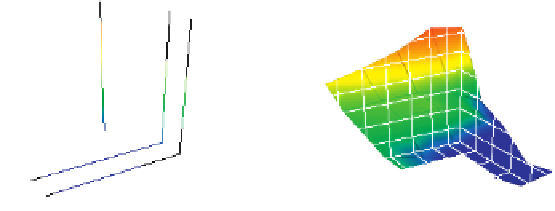
FIGURE 6.8
Strength surfaces for shoulder flexion and extension torque for males and females.
strength using logistic equations are shown in
Figure 6.9
. The format of this
approach is provided in
Equation (6.1)
, where
X
5
joint angle,
Y
5
contraction
velocity,
Z
5
peak torque, and parameters a
h define a unique surface for
each joint and torque direction:
Z
5
a
LOGISTIC X
ð
b
;
c
;
d
Þ
1
LOGISTIC Y
ð
e
;
f
;
g
Þ
1
(6.1)
Þ
LOGISTIC Y
LOGISTIC X
ð
h
;
c
;
d
ð
1
;
f
;
g
Þ
1
However, specific parameter values will depend on the units used
(e.g., degrees vs radians) and the sign conventions needed for any particular
digital human. That is, we display all strength values as positive here, but for
any specific DHM application the joint angles, contraction velocities, and tor-
que signs have to be adjusted to match the underlying framework of the
model (e.g., knee flexion torque may be negative and knee extension torque
positive, with the joint angles represented as negative values as the knee
moves into flexion). Thus, no one set of parameter values is likely to be uni-
versal across all DH models.














































































































































Search WWH ::

Custom Search