Biomedical Engineering Reference
In-Depth Information
B
z
θ
W"
A
W'
z
B
y
O"
W
B
x
O'
p
'
O
A
A
x
y
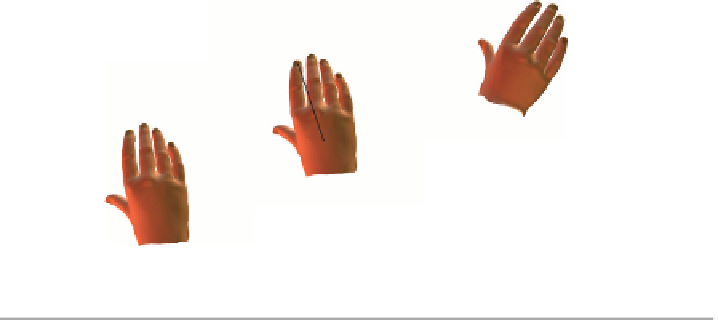
FIGURE 2.4
General motion of a rigid body from one position and orientation at A to a second position
and orientation at B.
the reference frame in which the vector is resolved and is read as:
as
seen by
A
. This general motion can also be written in terms of a rotation
matrix as
x
A
A
A
R
B
B
x
p
1
x
(2.2)
where
B
resolved in the
B
-coordinate system.
Of course, it is also possible that the rigid body undergoes first a rotation followed
by a translation, the results of which are the same.
Equation (2.2)
is indeed the most
important result, which applies to the general motion of a rigid body in 3D space.
x
is the vector
O
v
W
v
2.2.1
Example: rotation and translation
Calculating the effects of translations and rotations on target points and vectors in
a virtual environment is an important aspect. By inserting a virtual camera into
the human's eyes, the digital human is able to report back what can be seen from
this location, whether there exists obstacles in the design of a vehicle, but more
importantly, we have to calculate how the target point is seen by the original
coordinate system before motion. Consider a target point
Q
shown in
Figure 2.5
,
and given by
A
T
, which is read as a vector of magnitude 1 along the
x-axis and 0 along the y-axis, as resolved (or seen) by the
A
-coordinate system.
The person now walks to a new position (at 5 along the x-axis and 2 along the
y-axis), which therefore can be represented by a vector from the origin of the
x
Q
5
½
10






































Search WWH ::

Custom Search