Environmental Engineering Reference
In-Depth Information
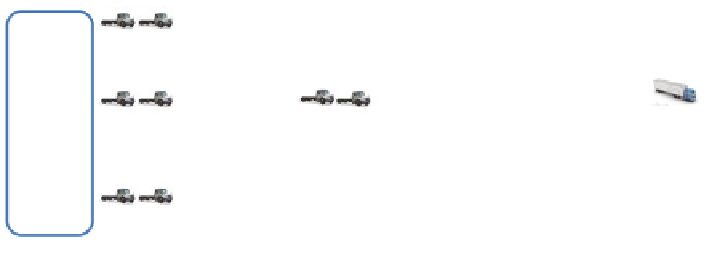
Activities for pick-up of
containers at yard
Entrance
process
Lane 1
Moving
and
loading the
required
container
to truck
Moving
containers
above the
required
container
Entrance
process
Truck
arrival
Exit
Lane 2
Entrance
process
Lane
n
Fig. 1
Process for picking up import container at container terminal
many researchers have studied to apply an automatic system for entrance process
with the aim to reduce processing time. This means that the service time can be
a constant value. Nevertheless, changing in the distribution of truck inter arrivals
and service time is handled because the proposed model can be implemented for
any distribution as simulation is used to represent this system. After entrance the
port, the truck will go to the stacking block and wait for picking import container.
The import containers are already stacked before trucks coming to pick them,
which means that the position of each container is known. It is assumed that a
truck can carry only one container at a given point of time. Therefore, each con-
tainer has its own available periods for pick up. The import yard system serves
based on First Come First Serve principle. If the container to be picked up is
located under other containers, the upper containers must be shuffled. Shuffling
means that the upper containers must be moved to other positions (with in the
block) in order that the required container can be picked up. The rule of shuffling
containers at import yard is defined as follows: (1) containers will be moved to
the lowest position, (2) if there are many possible places for moving, the contain-
ers are to be moved to the nearest position with inner position of higher priority.
Shuffling should be avoided because this is an ineffective activity. Obviously, a
methodology for optimizing the movement of containers, where the truck arrival
pattern is given, can be proposed. However, this would be a study by itself and
subject to further research. The time for moving containers is assumed to be lin-
early proportional with the distance of movement.
Due to scarce capacities in container terminals, usually trucks have to wait
long time, generating big volume of idling emissions. In order to reduce truck
idling time, it is necessary to control truck arrival times. In this study, we pro-
pose a method for this purpose: for each container the terminal operator provides
a number of available pick-up periods to the shipping company (or the trucker);
the trucker is free to select any one of the available periods for pick-up. It is
assumed that the probability distribution of a trucker's selection over the available
periods is known. Within the selected period, the arrival time of the truck is ran-
domly distributed. Different arrival patterns will yield different sequences of yard
crane operations even though the stacking of containers is given and the speed of

















Search WWH ::

Custom Search