Biomedical Engineering Reference
In-Depth Information
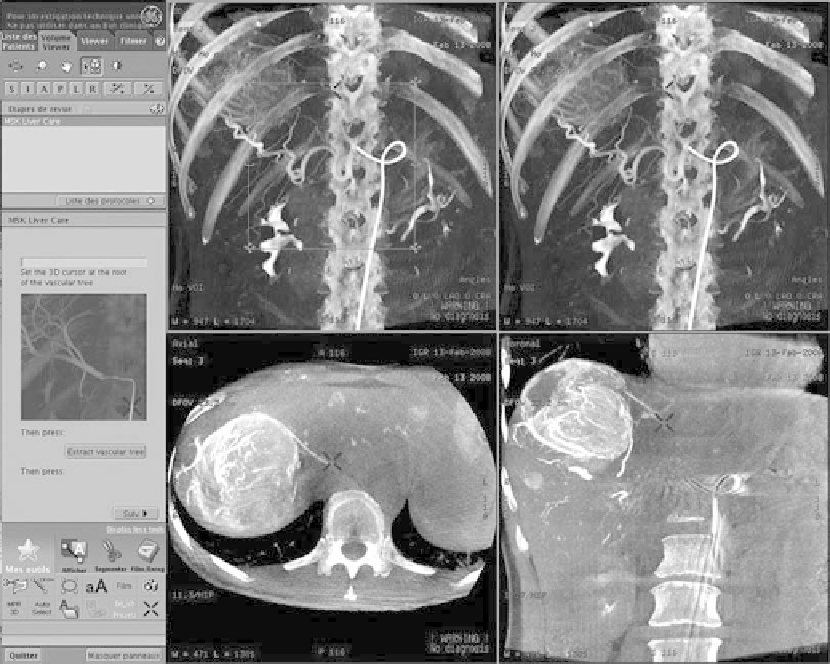
FIGURE 12.11
Image display on the Advantage Workstation. The upper views show a volume rendered reconstruction of the 3D image. Axial
and coronal multiplanar reconstructions are shown in the lower views. (Reprinted from Deschamps, F. et al.,
CardioVascular and Interventional
Radiology
33, 2010. © 2011, with permission from Springer Science + Business Media.)
12.4 potential Future Developments
12.4.2 robotically assisted Needle placement
Several different robotic systems have been developed to assist
in needle placement under imaging modalities such as CT, MRI,
or US. In collaboration with the URobotics Laboratory at Johns
Hopkins, our group employed a needle driver robot for spinal
nerve blocks at Georgetown University Hospital (Figure 12.12).
The robot used was from the same laboratory as the system
described by Solomon (Solomon et al. 2006) and includes a
remote center of motion capability for positioning the needle at
any angle. The needle driver is controlled by a joystick and touch
screen interface. Such systems might be incorporated with plan-
ning systems in the future to more precisely carry out thermal
ablations or be integrated with imaging devices for real-time
feedback and the ability to modify thermal treatment plans on
the fly for improved outcomes.
Just as medical imaging has continued to improve and enable
more minimally invasive procedures, the authors believe that
improvements in navigation systems and related technologies
will lead to their increased use in precision thermal interven-
tions. In this section, we present three areas where technology
development may contribute to improved thermal therapies.
12.4.1 Joystick Navigation for
Catheter placement
Catheter ablation is a commonly performed procedure in car-
diac interventions. Two remote catheter navigation systems have
been introduced into clinical practice, both enabling remote
joystick control of the ablation catheter (Ernst 2008). The Sensei
X Robotic Catheter system from Hansen Medical is based on
a steerable sheath that drives a remote catheter under joystick
control. The other system, Niobe from Stereotaxis, is based on a
steerable permanent magnet field that enables remote manipula-
tion of the catheter. While these systems are currently focused
on cardiac applications, the technology could be applied to
TACE for steering of the catheter or perhaps to future thermal
therapies with flexible applicators.
12.4.3 Combination therapy and
Navigation assistance
An exciting area where navigation assistance and computer-
based planning might play a significant role is combination
therapy. One combination therapy approach is based on trans-
catheter arterial chemoembolization (TACE) and radiofrequency