Biology Reference
In-Depth Information
the properties, shape, physical dimensions and mass of the material that the
sensor is made of.
9,10
The original resonance frequency of the sensor can be
determined by the following equation:
√
E
/
ρ
(1−
σ
2
)2
L
where
f
is the resonance frequency of the sensor,
E
is theYoung modulus of
elasticity,
ρ
is the density of the sensor material,
σ
is Poisson's ratio, and
L
is
the long dimension of the sensor.
10
Changes caused to the resonance fre-
quency of the sensor are a result of mass loaded to the surface of the sensor
and can be determined by the following equation, given that temperature
and humidity are stable:
f
=
Δ
f
=
−
f
Δ
m
2
M
where Δ
m
,
M
,
f
, and Δ
f
denote the change in mass of the sensor, initial mass
of the sensor, initial resonance frequency of the sensor, and shift in the reso-
nance frequency of the sensor, respectively
9,11
(
Fig. 7.9
).
As with all of the above techniques, microcantilever sensors can oper-
ate in the resonance frequency mode where a mass change on the sensor
surface leads to a shift in the resonance frequency.
43
Alternatively, these can-
tilevers can be operated in deflection mode, where binding of the target to
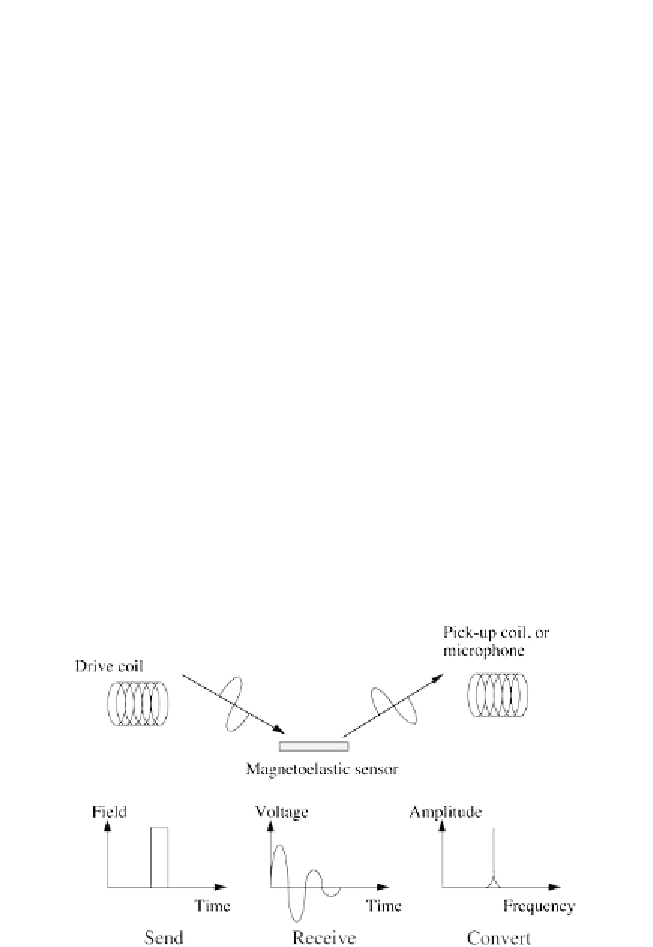
Figure 7.9
Drawing illustrating the remote query nature of magnetoelastic sensors.
A magnetic field impulse is applied to the sensor; the transient response is captured
and then converted into the frequency domain using a fast Fourier transform. The
resonant frequency is tracked to provide chemical and environmental information.
Source:
Figure 1 from Ref.
42
. Reprinted with permission. Copyright (2003) American
Chemical Society.
Search WWH ::

Custom Search