Graphics Reference
In-Depth Information
2.2.1
Fixed-angle representation
A
fixed-angle
representation
4
really refers to “angles used to rotate about fixed axes.” A fixed order of
three rotations is implied, such as
x
-
y
-
z
. This means that orientation is given by a set of three ordered
parameters that represent three ordered rotations about fixed axes: first around
x
, then around
y
, and then
around
z
. There aremany possible orderings of the rotations, and, in fact, it is not necessary to use all three
coordinate axes. For example,
x-y-x
is a feasible set of rotations. The only orderings that do not make
sense are those in which an axis immediately follows itself, such as in
x-x-y
. In any case, the main point
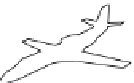
is that the orientation of an object is given by three angles, such as (10, 45, 90). In this example, the ori-
entation represented is obtained by rotating the object first about the
x
-axis by 10 degrees, then about the
y
-axis by 45 degrees, and then about the
z
-axis by 90 degrees. In
Figure 2.16
,
the aircraft is shown in its
initial orientation and in the orientation represented by the values of (10, 45, 90).
The following notation will be used to represent such a sequence of rotations:
R
z
(90)
R
y
(45)
R
x
(10)
(in this text, transformations are implemented by premultiplying column vectors by transformation
matrices; thus, the rotation matrices appear in right to left order).
From this orientation, changing the
x
-axis rotation value, which is applied first to the data points,
will make the aircraft's nose dip more or less in the
y-z
plane. Changing the
y
-axis rotation will change
the amount the aircraft, which has been rotated around the
x
-axis, rotates out of the
y-z
plane. Changing
the
z
-axis rotation value, the rotation applied last, will change how much the twice-rotated aircraft will
rotate about the
z
-axis.
The problem with using this scheme is that two of the axes of rotation can effectively line up on top
of each other when an object can rotate freely in space (or around a 3 degree of freedom
5
joint). Con-
sider an object in an orientation represented by (0, 90, 0), as shown in
Figure 2.17
.
Examine the effect a
slight change in the first and third parametric values has on the object in that orientation. A slight
change of the third parameter will rotate the object slightly about the global
z
-axis because that is
the rotation applied last to the data points. However, note that the effect of a slight change of the first
y
y
x
x
z
z
FIGURE 2.16
Fixed-angle representation.
4
Terms referring to rotational representations are not used consistently in the literature. This topic follows the usage found in
Robotics
[
1
]
, where fixed angle refers to rotation about the fixed (global) axes and Euler angle refers to rotation about the
rotating (local) axes.
5
The degrees of freedom that an object possesses is the number of independent variables that have to be specified to
completely locate that object (and all of its parts).































































































Search WWH ::

Custom Search