Graphics Reference
In-Depth Information
c
F
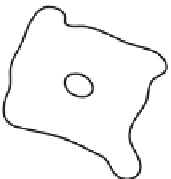
FIGURE B.53
Center of mass.
r
—vector from center of
mass to point where
force is applied
F
—force vector
r
—torque vector
F
c
FIGURE B.54
Applying a force off-center induces a torque.
It is important to note that
torque
refers to a specific axis of rotation and is perpendicular to both
r
and
F
in
Figure B.54
.
The same force can exert different torques about different axes of rotation if it is
applied at different locations on an object. A given torque vector for a rigid body is position indepen-
dent. That is, for any particle in a rigid mass, the particle is undergoing that same torque.
B.7.7
Equilibrium: balancing forces
In the absence of acceleration, there is no change in the motion of an object (Newton's first law). In
such cases, the net force and the torque acting on a body vanish (
Eqs. B.106
and
B.107
). There may be
forces present, but the vector sum is equal to zero.
SF ¼
0
(B.106)
St ¼
0
(B.107)
B.7.8
Gravity
Equation B.108
is Newton's law of universal gravitation. It calculates the force of gravity between two
masses (
m
1
and
m
2
) whose centers of mass are a distance
r
apart.
G
is the universal gravitational con-
stant equal to 6.67
10
11
Newton meter
2
/kilogram
2
. When two objects are not touching, each acts on
the other as if all its mass were concentrated at its center of mass. When an object is on (or near) the
earth's surface, the distance of the object to the center of mass of the earth, the mass of the earth, and the















Search WWH ::

Custom Search