Graphics Reference
In-Depth Information
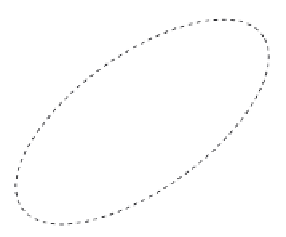
Sample points on
surface of polyhedron
Polygonal object
Collection of implicit surfaces
used to approximate polyhedron
FIGURE 12.5
Using implicit surfaces for detecting collisions between polyhedral objects.
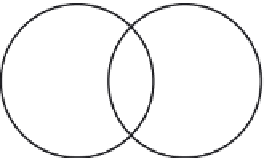
Undeformed implicit surfaces
F
j
(
p
)
0
F
i
(
p
)
0
Object
i
Object
j
Penetration region
Propagation region
FIGURE 12.6
Penetrating implicit surfaces.
penetration region
. An additional region just outside the penetration region is called the
propagation
region
(
Figure 12.6
)
.
The density function of each object is modified by the overlapping density function of the other
object to deform the implicitly defined surface of both objects so that they coincide in the region of
overlap, thus creating a contact surface (
Figure 12.7
)
. As shown in the example in
Figure 12.7
,
a defor-
mation term is added to
F
i
as a function of Object
j
's overlap with Object
i
,
G
ij
, to form the contact
surface. Similarly, a deformation term is added to
F
j
as a function of Object
i
's overlap with Object
j
,
G
ji
. The deformation functions are defined so that the isosurface of the modified density functions,





























Search WWH ::

Custom Search