Graphics Reference
In-Depth Information
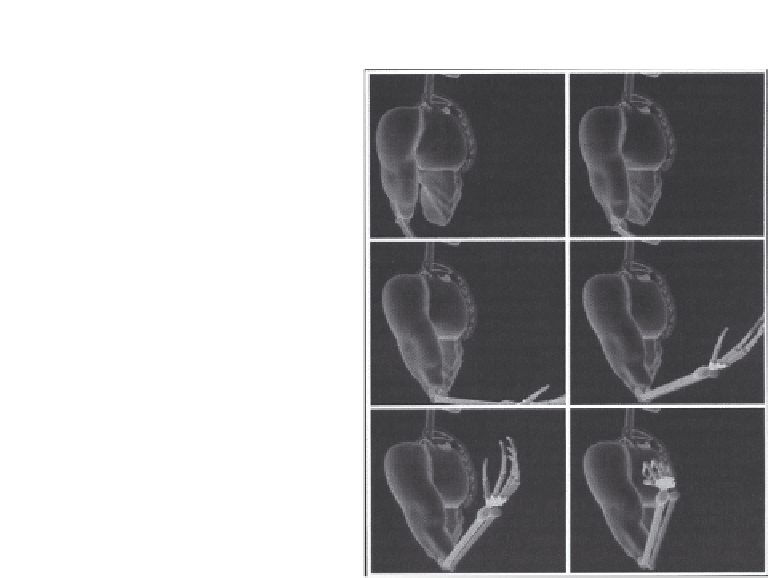
FIGURE 9.5
9.2
Reaching and grasping
One of the most common human figure animation tasks involves movement of the upper limbs. A syn-
thetic figure may be required to reach and operate a control, raise a coffee cup from a table up to his
mouth to drink, or turn a complex object over and over to examine it. It is computationally simpler to
consider the arm as an appendage that moves independently of the rest of the body. In some cases, this
can result in unnatural-looking motion. To produce more realistic motion, the user often involves addi-
tional joints of the body in executing the motion. In this section, the arm is considered in isolation. It is
assumed that additional joints, if needed, can be added to the reaching motion in a preprocessing step
that positions the figure and readies it for independently considered arm motion.
9.2.1
Modeling the arm
The basic model of the human arm, ignoring the joints of the hand for now, can be most simply repre-
sented as a seven DOFs manipulator (
Figure 9.6
)
: three DOFs are at the shoulder joint, one at the elbow,
and three at the wrist. See
Chapter 5
for an explanation of joint representation, forward kinematics, and
inverse kinematics. A
configuration
or
pose
for the arm is a set of seven joint angles, one for each of the
seven DOFs of the model.
Forearm rotation presents a problem. In
Figure 9.6
,
the forearm rotation is associated with the wrist.
However, in reality, the forearm rotation is not associated with a localized joint like most of the other



Search WWH ::

Custom Search