Graphics Reference
In-Depth Information
A
(
t
)
v
B
(
t
)
p
A
x
A
(
t
)
p
B
B
(
t
)
x
B
(
t
)
v
A
(
t
)
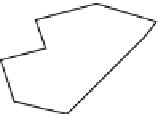
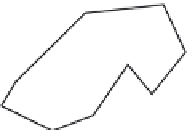
FIGURE 7.23
Configuration of colliding objects.
p
A
ðtÞ¼
v
A
ðtÞþo
A
ðtÞ
r
A
ðtÞ
_
(7.59)
p
B
ðtÞ¼
v
B
ðtÞþo
B
ðtÞ
r
B
ðtÞ
ð
v
A
;
w
B
The linear and angular velocities of the objects before the collision
Þ
are updated by the
ð
v
A
;
w
þ
B
impulse to form the linear and angular velocities after the collision
. The linear velocities are
updated by adding in the effect of the impulse scaled by one over the mass (
Eq. 7.60
). The angular
velocities are updated by computing the effect of the impulse on the angular velocity of the objects
(
Eq. 7.61
).
Þ
j
N
M
A
v
A
ðtÞ¼
v
A
ðtÞþ
(7.60)
j
N
M
B
v
B
ðtÞ¼
v
B
ðtÞþ
o
A
ðtÞ¼o
A
ðtÞþI
A
ðr
A
ðtÞjNÞ
o
B
ðtÞ¼o
B
ðtÞþI
B
ðr
B
ðtÞjNÞ
(7.61)
To solve for the impulse, form the difference between the velocities of the contact points after
Equation 7.59
for velocities after collision is substituted into
Equation 7.62
.
Equations 7.60 and
7.61
are then substituted into that to produce
Equation 7.63
.
Finally, substituting into
Equation 7.56
v
A
ðtÞ¼ðð
p
A
ðtÞ
p
B
ðtÞÞ
N
Þ
N
(7.62)
v
A
ðtÞþo
A
ðtÞ
v
rel
ðtÞ¼
v
B
ðtÞþo
B
N
ð
r
A
ðtÞð
r
B
ðtÞÞÞ
(7.63)
ðð
1
þ kÞv
rel
j ¼
(7.64)
M
A
þ
1
M
B
þ
N
ðI
1
1
A
ðtÞð
r
A
ðtÞ
N
Þ
r
A
ðtÞI
1
B
ðtÞð
r
B
ðtÞ
N
Þ
r
B
ðtÞÞ
Contact between two objects is defined by the point on each object involved in the contact and the
normal to the surface of contact. A point of contact is tested to see if an actual collision is taking place.
When collision is tested for, the velocity of the contact point on each object is calculated. A collision is
detected if the component of the relative velocity of the two points in the direction of the normal indi-
cates the contact points are approaching each other.














Search WWH ::

Custom Search