Graphics Reference
In-Depth Information
7.3.8
Particle life span
Typically, each particle will have a life span. The particle data structure itself can be reused in the sys-
tem so that a particle systemmight have tens of thousands of particles over the life of the simulation but
only, for example, one thousand in existence at any one time. Initial values are set pseudorandomly so
that particles are spawned in a controlled manner but with some variability.
7.4
Rigid body simulation
A common objective in computer animation is to create realistic-looking motion. A major component
of realistic motion is the physically based reaction of rigid bodies to commonly encountered forces such
as gravity, viscosity, friction, and those resulting from collisions. Creating realistic motion with key-
frame techniques can be a daunting task. However, the equations of motion can be incorporated into an
animation system to automatically calculate these reactions. This can eliminate considerable tedium—
if the animator is willing to relinquish precise control over the motion of some objects.
In rigid body simulation, various forces to be simulated are modeled in the system. These forces
may arise due to relative positioning of objects (e.g., gravity, collisions), object velocity (e.g., viscos-
ity), or the absolute position of objects in user-specified vector fields (e.g., wind). When applied to
objects, these forces induce linear and angular accelerations based on the mass of the object (in the
linear case) and mass distribution of the object (in the angular case). These accelerations, which are
the time derivative of velocities, are integrated over a delta time step to produce changes in object
velocities (linear and angular). These velocities, in turn integrated over a delta time step, produce
changes in object positions and orientations (
Figure 7.6
). The new positions and velocities of the
objects give rise to new forces, and the process repeats for the next time step.
The free flight of objects through space is a simple type of rigid body simulation. The simulation of
rigid body physics becomes more complex as objects collide, roll and slide over one another, and come
to rest in complex arrangements. In addition, a persistent issue in rigid body simulation, as with most
animation, is the modeling of a continuous process (such as physics) with discrete time steps. The trade-
off of accuracy for computational efficiency is an ever-present consideration.
object properties (e.g., position,
linear and angular velocity,
linear and angular momentum,
mass)
calculate forces (e.g., wind,
gravity, viscosity)
calculate change in
objects' positions,
velocities, momenta
calculate accelerations
from objects' masses
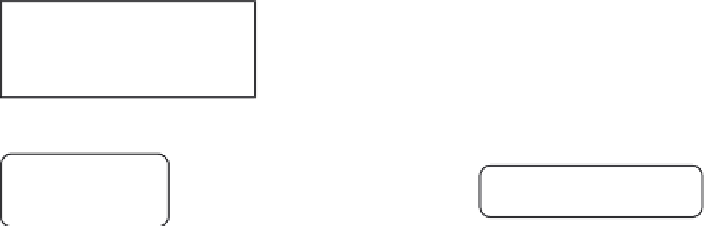
FIGURE 7.6
Rigid body simulation update cycle.










Search WWH ::

Custom Search