Graphics Reference
In-Depth Information
A constant problem with motion capture systems is noise. Noise can arise from the physical system;
the markers can move relative to their initial positioning and the faster the performer moves, the more
the markers can swing and reposition themselves. Noise also arises from the sampling process; the
markers are sampled in time and space, and errors can be introduced in all dimensions. A typical error
might result in inaccurate positioning of a feature point by half a centimeter. For some animations, this
can be a significant error.
To deal with the noise, the user can condition the data before they are used in the reconstruction pro-
cess. Data points that are radically inconsistent with typical values can be thrown out, and the rest can be
filtered. The objective is to smooth the data without removing any useful features. A simple weighted
average of adjacent values can be used to smooth the curve. The number of adjacent values to use
and their weights are a function of the desired smoothness. Generally, this must be selected by the user.
6.3
Camera calibration
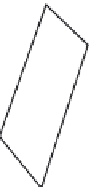
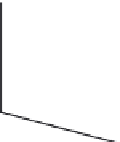
Before the three-dimensional position of a marker can be reconstructed, it is necessary to know the
locations and orientations of cameras in world space as well as the intrinsic properties of the cameras
A simple pinhole camera model is used for the calibration. This is an idealized model that does not
accurately represent certain optical effects often present in real cameras, but it is usually sufficient for
computer graphics and image-processing applications. The pinhole model defines the basic projective
geometry used to describe the imaging of a point in three-space. For example, the camera's coordinate
system is defined with the origin at the center of projection and the plane of projection at a focal-length
distance along the positive
z
-axis, which is pointed toward the camera's center of interest (
Figure 6.2
)
.
Equivalently, the projection plane could be a focal length along the negative
z
-axis on the other side of
the center of projection from the center of interest; this would produce an inverted image, but the math-
ematics would be the same.
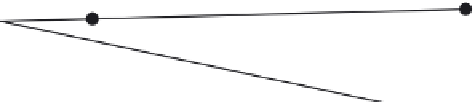
The image of a point is formed by projecting a ray from the point to the center of projection
(
Figure 6.3
)
. The image of the point is formed on the image (projection) plane where this ray intersects
the plane. The equations for this point, as should be familiar to the reader, are formed by similar tri-
angles. Camera calibration is performed by recording a number of image space points whose world
World space point
Center of projection
Center of interest
Focal length
Camera coordinate system
World coordinate system
FIGURE 6.2
Camera model.

















Search WWH ::

Custom Search