Graphics Reference
In-Depth Information
g
1
g
2
g
3
V
2
V
3
V
1
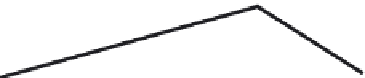
FIGURE 5.18
Instantaneous changes in position induced by joint angle rotations.
5.3.3
Numeric solutions to IK
Solution using the inverse Jacobian
Once the Jacobian has been computed, an equation in the form of Equation
5.18
is to be solved. In the
case that
J
is a square matrix, the inverse of the Jacobian,
J
1
, is used to compute the joint angle veloc-
ities given the end effector velocities
(Eq. 5.19)
.
V ¼ J y
(5.18)
V ¼ y
J
1
(5.19)
If the inverse of the Jacobian (
J
1
) does not exist, then the system is said to be singular for the given
joint angles. A singularity occurs when a linear combination of the joint angle velocities cannot be
formed to produce the desired end effector velocities. As a simple example of such a situation, consider
a fully extended planar arm with a goal position somewhere on the forearm (see
Figure 5.19
)
. In such a
case, a change in each joint angle would produce a vector perpendicular to the desired direction. Obvi-
ously, no linear combination of these vectors could produce the desired motion vector. Unfortunately,
all of the singularities of a system cannot be determined simply by visually inspecting the possible
geometric configurations of the linkage.
Additionally, a configuration that is only close to being a singularity can still present major prob-
lems. If the joints of the linkage in
Figure 5.19
are slightly perturbed, then the configuration is not
singular. However, in order to form a linear combination of the resulting instantaneous change vectors,
very large values must be used. This results in large impulses near areas of singularities. These must be
clamped to more reasonable values. Even then, numerical error can result in unpredictable motion.
Problems with singularities can be reduced if the manipulator is redundant—when there are more
DOF than there are constraints to be satisfied. In this case, the Jacobian is not a square matrix and,
potentially, there are an infinite number of solutions to the IK problem. Because the Jacobian is not
square, a conventional inverse does not exist. However, if the columns of
J
are linearly independent














Search WWH ::

Custom Search