Graphics Reference
In-Depth Information
the nodes below it in the hierarchy. Relating a tree arc to a figure joint may seem counterintuitive, but it
is convenient because a node of the tree can have several arcs emanating from it, just as an object part
may have several joints attached to it. In a discussion of a hierarchical model presented by a specific
tree structure, the terms
node, object part
, and
link
are used interchangeably since all refer to the geom-
etry to be articulated. Similarly, the terms
joint
and
arc
are used interchangeably.
In the tree structure, there is a root arc that represents a global transformation to apply to the root
node (and, therefore, indirectly to all of the nodes of the tree). Changing this transformation will rigidly
reposition the entire structure in the global coordinate system (see
Figure 5.5
)
.
A node of the tree structure contains the information necessary to define the object part in a position
ready to be articulated. In the case of rotational joints, this means that the point of rotation on the object
part is made to coincide with the origin. The object data may be defined in such a position, or there may
be a transformation matrix contained in the node that, when applied to the object data, positions it so.
In either case, all of the information necessary to prepare the object data for articulation is contained at
the node. The node represents the transformation of the object data into a link of the hierarchical model.
Two types of transformations are associated with an arc leading to a node. One transformation
rotates and translates the object into its position of attachment relative to the link one position up
in the hierarchy. This defines the link's neutral position relative to its parent. The other transformation
is the variable information responsible for the actual joint articulation (see
Figure 5.6
)
.
A simple example
Consider the simple, two-dimensional three-link example of
Figure 5.7
.
In this example, there is
assumed to be no transformation at any of the nodes; the data are defined in a position ready for artic-
ulation.
Link
0
, the root object, is transformed to its orientation and position in global space by
T
0
.
root node
root arc
root
joint
link
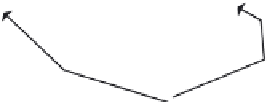
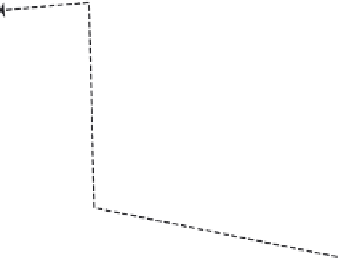
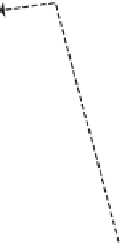
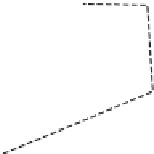
Articulated figure
Abstract hierarchical
representation
Tree structure
FIGURE 5.5
Example of a tree structure representing a hierarchical structure.



























































Search WWH ::

Custom Search