Graphics Reference
In-Depth Information
As mentioned before, the space curve that defines the path along which the object moves is inde-
pendent of the speed control curves that define the relative velocity along the path as a function of time.
A single space curve could have several velocity-time curves defined along it. A single distance-time
curve, such as a standard ease-in/ease-out function, could be applied to several different space curves.
Reusing distance-time curves is facilitated if normalized distance and time are used.
Motion control frequently requires specifying positions and speeds along the space curve at specific
times. An example might be specifying the motion of a hand as it reaches out to grasp an object; initially
the hand accelerates toward the object and then, as it comes close, it slows down to almost zero speed
before picking up the object. The motion is specified as a sequence of constraints on time, position (in
this case, arc length traveled along a space curve), velocity, and acceleration. Stating the problemmore
formally, each point to be constrained is an n-tuple,
, where
s
i
is position,
v
i
is veloc-
ity,
a
i
is acceleration, and
t
i
is the time at which all the constraints must be satisfied (the ellipses,
<t
i
,
s
i
,
v
i
,
a
i
,
,
>
...
,
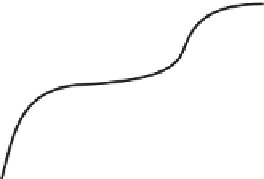
indicate that higher order derivatives may be constrained). Define the zero-order constraint problem to
be that of satisfying sets of two-tuples,
...
, while velocity, acceleration, and so on are allowed to
take on any values necessary to meet the position constraints at the specified times. Zero-order con-
strained motion is illustrated at the top of
Figure 3.21
.
Notice that there is continuity of position but not
of speed. By extension, the first-order constraint problem requires satisfying sets of three-tuples,
<t
i
,
s
i
>
<s
i
,
v
i
,
t
i
>
, as shown in the bottom illustration in
Figure 3.21
. Standard interpolation techniques (see
Appendix
B.5
) can be used to aid the user in generating distance-time curves.
s
s
t
t
Distance-time constraints specified
Resulting curve
s
s
t
Velocity-distance-time constraints specified
t
Resulting curve
FIGURE 3.21
Specifying motion constraints.



































Search WWH ::

Custom Search