Graphics Reference
In-Depth Information
The notions of “clockwise” and “counterclockwise” angles, and “the angle
from ray1 to ray2” (which might be much larger than
T
) and of angles that “wrap
around multiple times” can all be defined with careful adjustments of the definition
above; in our study of light, though, we'll have no need for these ideas, so we'll
simply use the definition of angle and measure above.
π
One common use of angles is the notion of the angle
subtended
by some
shape,
T
, at a point
P
(see Figure 26.19). The shape
T
is projected onto the unit
circle
C
around
P
, and the measure of the resultant angle is called
the angle sub-
tended by
T
at
P
.
In equations, the angle subtended by
T
at
P
is
P
C
Figure
26.19:
The
angle
sub-
{
S
(
X
−
P
):
X
∈
T
}
.
(26.21)
tended by T at P.
We can now describe solid angles in
R
3
by analogy. A
solid angle
at a point
R
3
is a (measurable) subset
Ω
of the unit sphere about
P
, or, equivalently, a
measurable subset of
S
2
, the collection of all unit vectors in 3-space. The
measure
of the solid angle
of
Ω
is the
area
of the set
Ω
(see Figure 26.20).
P
∈
When we want to treat points in a solid angle as unit vectors, we'll use bold
Greek letters, almost always using the letter
V
. We'll often write “Let
v
∈
Ω
...
”,
v
and thereafter treat
as a unit vector, writing expressions like
v
·
n
to compute
v
the length of the projection of a vector
n
onto
. In fact, this use of a solid angle
as a collection of direction vectors is almost the only one we'll see.
The notion of subtended angle can also be extended to three dimensions: If
T
is a shape in
R
3
and
P
a point of
R
3
with
P
v
T
,the
solid angle subtended by
T
at
P
is the area of the radial projection of
T
onto the unit sphere at
P
, in exact
analogy with the two-dimensional case. More precisely, the solid angle subtended
by
T
at
P
is
∈
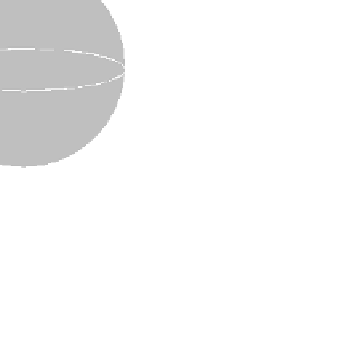
Figure 26.20: The solid angle
Ω
is a set on the surface of the unit
sphere. The measure of the solid
angle is the area of this set.
{
S
(
Q
−
P
):
Q
∈
T
}
,
in exact analogy with the 2D case.
This definition lets us speak of “solid angles” on other spheres (e.g., like the
Earth) by defining their measure to be the measure of the solid angle they subtend
at the center of the sphere. It's easy to show that if
U
is a subset of a sphere of
radius
r
about
P
,andtheareaof
U
is
A
, then the solid angle represented by
U
(i.e., the solid angle subtended by
U
at
P
)is
A
r
2
. When we speak of measuring
a solid angle on some arbitrary sphere (like the Earth, or a spherical lightbulb), it
is implicit that we mean “the solid angle subtended at the center of the sphere by
this region.”
/
Inline Exercise 26.10:
Estimate the solid angle measure of your country as a
solid angle on the (roughly) spherical earth. Use 13,000 km (or 8000 mi) as the
diameter of the Earth.
Notation:
It's conventional to use
Ω
to denote both a solid angle and the mea-
sure of that solid angle (just as we use
to denote an angle and its measure in the
plane). Just as we often use
x
as a variable of integration in calculus, it's common
to use the letter
Ω
to denote a solid angle, and
θ
to denote a member of
Ω
, so that
v
is a unit vector.
v