Graphics Reference
In-Depth Information
C
S
P
click!
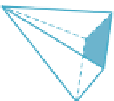
Figure 11.11: When the user clicks near the lower-right corner of the display, we can
recover the 3-space coordinates of a corresponding point S of the imaging plane in 3-space;
we'll use this to determine where a ray from the eye through this point hits the virtual
sphere.
To determine the point
P
corresponding to this click, we ask where the ray
parameterized by
R
(
t
)=
C
+
t
(
S
−
C
)
(11.46)
meets the virtual sphere, which we'll assume, for simplicity, is the unit sphere
defined by
x
2
+
y
2
+
z
2
=
1. In other words, the unit sphere, if displayed, would
just touch two sides of our display rectangle. For the point
R
(
t
)
to lie on the sphere,
its coordinates (which we'll call
r
x
,
r
y
, and
r
z
) must satisfy the defining equation
of the sphere, that is,
r
x
+
r
y
+
r
z
=
1.
(11.47)
Alternatively, we can consider the vector from the origin
O
to
R
(
t
)
, that is,
C
+
t
(
S
−
C
)
−
O
; this vector must have unit length, which means it must satisfy
(
R
(
t
)
−
O
)
·
(
R
(
t
)
−
O
)=
1. Letting
u
denote
S
−
C
, this becomes
(
C
−
O
+
t
u
)
·
(
C
−
O
+
t
u
)=
1,
(11.48)
which we can simplify and expand; letting
c
=
C
−
O
, we get
u
)
t
2
+(
2
c
(
u
·
·
u
)
t
+
c
·
c
=
1,
(11.49)
which is a quadratic in
t
; we solve to get
(
c
t
=
−
c
·
u
±
·
u
)
2
−
(
u
·
u
)(
c
·
c
)
.
(11.50)
u
·
u
The smaller
t
value—call it
t
1
—corresponds to the first intersection of the ray with
the sphere; using this, we can compute the sphere point
P
=
C
+
t
1
(
S
−
C
)
.
(11.51)
(It's possible that both solutions for
t
are not real numbers, in which case the ray
does not intersect the sphere: The user did not click on the image of the virtual
sphere on the display.)
As the user drags the mouse, we can, at each instant, compute the correspond-
ing sphere point
Q
in the same way. From
P
and
Q
, we compute a rotation of the